
© 2021 Rico A.R. Picone, All Rights Reserved
© 2021 Rico A.R. Picone, All Rights Reserved
What is a robot? Due to the wide variety of existing robots, it can be challenging to identify the gist of the term, but here are some I claim are essential:
A robot has a mechanical presence in an environment.
A robot can partially sense its environment.
A robot can mechanically act on its environment.
A robot can act intelligently.
A robot is designed by humans.Or, at least, if it was designed by a robot, which was designed by a robot, etc.—the original robot must have been designed by a human.
A robot is autonomous, acting at least partially without direct human intervention.
These are each necessary conditions for a device to be a robot. However, I claim they collectively are sufficient conditions. In other words, a device must have all these qualities to be a robot, and if it is missing any, it is not a robot. Although this definition of a robot may be flawed, or may change in the future, it gives us a useful device for discerning if a given device is a robot or not. Furthermore, it allows us to determine which qualities the device would need to have to be considered a robot.
Is it a robot? Classify each of the following as robot or not-robot. If it is not a robot, list the missing qualities. Comment on ambiguities.
We will explore the meaning of each of the qualities of a robot in the following lectures. For now, let’s pause a moment to consider the “why” of robotics.
Why do we make robots? Reasons include:
One motivating factor seems to be the awe we experience when creating something that appears life-like. In fact, creating artificial life has been one of the explicit goals of some roboticists. Other roboticists have been inspired by (biological) life to create more effective robots; this field is called biomimicry.
A related reason to robot is that while we’re creating artificial life and biomimetic robots, we frequently “reverse engineer” biological life, which yields a deeper grokking of biology. We can develop robots in service of biology.
Robots help manufacture cars, airplanes, food, computers, cell phones, and many other things we like.
Instead of humans doing certain dangerous work, like cleaning up a toxic chemical spill, robots can take our places.
Especially in manufacturing, but also in household chores, robots can replace humans in work that is repetitive and boring. This has the potential to free up human time for activity we find more meaningful.
Robot-assisted surgery, for instance, allows a human surgeon to guide a robot through a delicate procedure that requires mechanical precision beyond that of human capability.
Robots give us economic advantages, which give us money. Under our estrangement in capitalism, we fetishize money not for its exchange value, but for itself.
We must address something here: despite its advantages, does not robot labor necessarily lead to the loss of human jobs and the further concentration of wealth? Yes and no. Yes, robot labor has in fact reduced human jobs and concentrated wealth, and it will continue to do so under the currect world economic system (capitalism). No, this loss of human jobs is not necessary. Under a different economic system, robot labor could have a positive impact on human being.
For a device to be considered a robot, it must have a mechanical presence in an environment. One immediate conclusion from this is that a simulation is not a robot. This does not mean we cannot simulate robots. In fact, we must simulate a robot to design one of any value, which is part of why we spend several chapters on just that, later in this text.
So what does it mean that a simulation is not a robot? There are two points here being emphasized.
Reality is much more complicated than can be simulated, and therefore even good robot simulations cannot account for everything. Reality’s tough, kid!
Simulations of robots are great, but they can do no mechanical work.
Or, put simply: a simulation doth not a robot make.
Another implication of the mechanicality of a robot is that it has space and therefore matter and form. What is the stuff (matter) of a robot? Most robots are made of the usual materials found in machines: metals, plastics, rubbers, and ceramics. And, of course, silocon. The form one takes depends on its function. A robot that must change its location requires a means of locomotion. One that must manipulate objects in the world must change its own orientation relative to the world.
These last two are more than simple examples. They divide the two primary types of robots: mobile robots and manipulation robots. The paradigmatic case of the former is the self-driving carA self-driving car as an example of a mobile robot. (PR) 
and of the latter is the manufacturing robot arm.A robot arm as an example of a manipulation robot. (PR) 
There’s no reason a self-driving car can’t have a robot arm (can’t be both a mobile and a manipulation robot), but that’s just showing off.
Mobile robots must do something basic to animal life: move about in an environment. Moving about, or locomotion, is a fascinating topic with novelty everywhere. Something that makes it challenging is that it depends on both the robot and its environment. For instance, a robot that locomotes with wheels might not be effective at navigating the terrain of a rocky hillside, and a lake even less-so.
Locomotion, then is a robot-environment problem. Some types of environments commonly considered are: on-ground (i.e. terrestrial), under-ground (i.e. fossorial), in-liquid (e.g. aqueous), in-gas (e.g. aerial), and space. Most robots effectively move about in only one of these. Usually, there is enough variation in each type of environment (e.g. calm versus stormy air) to render robots effective in just a subset of the types of environment listed above.
Examples of methods of locomotion include:
Examples of robotic locomotion devices include:
Locomotion is one of the fields of robotics that relies most heavily on biomimicry. Animals have developed incredible and unique methods of locomotion, and the study of them has been a gold mine for robotics.
It is worth considering here a three-fold distinction made among actuators, effectors, and behaviors. Consider the figures of the aerial robotA flapping winged aerial robot. 
that flies by flapping its wings.Wings effector. 
The motorA motor actuator. 
actuates the wings (effectors) which produces the behavior of flapping or flying.
This brings us to another important consideration in mobile robotics, navigation. This involves several of the qualities of a robot we’ll consider in the text, but the mechanical facet of navigation is that of describing spatial location and orientation through time, and the forces involved. We’ll return to these considerations, which constitute the study of mechanics, at the end of this lecture.
Manipulation robots move around objects in the world. Although it is not a requirement, most of the time they are themselves stationary, attached to something relatively fixed. This helps the robot move things by providing “somewhere to stand,” as it were.
Manipulation robots also use actuators, effectors, and exhibit behaviors. The behavior of grasping is especially important for manipulation robots: by grasping an object (typically with an effector called a “gripper”), it becomes rigidly attached to the effector, the position and orientation of which is presumably known to the robot, and the robot can then manipulate the object by changing its own position and orientation.
It’s hard to think a manipulation robot without an arm, a fact that jives with a survey of primates, animals known for cognition and an ability to manipulate tools. This does not mean there aren’t superior ways, but that arms are, dare I say, close at hand to a human designer.
Let’s consider another way of understanding the advantages of an arm for a manipulation robot. The concept of degrees of freedom (DOF) will help us here. Later we will consider the world’s three-dimensional space in greater detail, but for now consider that an object in this space can potentially translate in three independent directions and rotate about three independent axes. Speaking a somewhat simplified mode, we can say that a robot has a degree of freedom for each independent axis along with it can translate and about which it can rotate. Returning, then, to the arm, we see it has several joints that allow it to increase its DOF. The jointedness of arms are the key to their excellence in manipulation: the more degrees of freedom it has to move, the more complex can its movements be.
There are systematic ways of classifying joints and arms in terms of DOF, which we will later consider. For now, we simply want to understand the motivation of going into a detailed analysis. The goal of analyzing joints and arms is to describe an arm’s position and orientation, how to make it move from one to another, and understanding the forces there-involved. As in the conclusion of the preceding section on locomotion, we have found ourselves concerned with matters of mechanics.
Mechanics is the study of the motion of matter and the causes and effects thereof. We call the cause of motion force, which is typically understood to potentially produce the motion of matter. As mechanical engineers, we are interested in several sub-fields of mechanics, including fluid mechanics, solid mechanics, and rigid-body mechanics. Most of these specialized fields of study are focused on the motion and forces that cause it in specific types of material.
It is convenient to differentiate between two primary considerations in mechanics: kinematics, which mathematically describes the motion of matter and kinetics, which mathematically describes the forces that cause motion.
A famously challenging aspect of mechanics in robotics is called inverse kinematics, which is the study of how to “back out” the positions and orientations of a robot’s parts that yield some desirable overall configuration. The quintessential example here is a robot arm: if we want the gripper to be located in a certain position and orientation, where should each of the individual joints be?
There are frequently multiple solutions for a given gripper configuration. This problem is exacerbated by the fact that frequently there are additional constraints on variables, yielding a system of equations and inequalities. Even worse, these equations are usually nonlinear. Good analytic and numerical techniques for inverse kinematics have been developed, and we will consider some later in the text.
A necessary part of a robot’s intelligence is its ability to sense its environment. The old joke that
to a hammer
everything looks like a nail
is apropos and pairs well with the gibe
dummer than a bag of hammers
to suggest that intelligence requires a sensitivity utterly lacking in a hammer, which, of course, makes a poor robot. But what does it mean to be sensitive? Fundamentally, it involves an interaction between a robot and itself or its environment. This interaction is called perception or measurement, which is another fascinating field of study. This is not the place to delve into the theory of measurement, but I do highly recommend doing so at some point.
So a robot measures itself (proprioception) and its environment (exteroception). Clearly, for intelligent behavior in an environment, it must act in accordance with this measurement. In sec. in.in we will consider the details of acting in accordance with a measurement, but for now, we can just acknowledge that it must be so.
What about itself and its environment does a robot measure? Given the mechanicality discussed in the preceding lecture, it certainly has to measure aspects of space and time: length, position, duration, velocity, acceleration, force, torque, etc. But additional quantities will be important in many applications: voltage, current, pressure, flowrate, temperature, heat, sound, light, etc.
How does a robot measure? Consider fig. in.se.1. The device at the point of measurement is called a sensor. A sensor output is almost always a electronic signal: a low-power, information-bearing voltage through time. A sensor is frequently supported by electronics that provide power to the sensor, amplify the signal, or filter the signal. The output signal of the support electronics is usually connected to more electronics or a computing device that decides what to do with the measurement.

Measurements are never perfectly accurate; in fact, it is a fundamental quality of measurement that
every measurement affects the measurand.
That is, measuring changes the state of the thing measured. And beyond this fundamental limit, virtually all measurements include thermal noise a random signal that is introduced through the microscopic motion of matter at nonzero temperature.
A sensor, then, is a type of energy transducer, converting one form of energy into another. Since the output energy domain is normally electronic, sensors are electro-mechanical/photo/thermo/etc. transducers. This is one reason there has been such interest in materials and processes that exhibit this type of transduction. For instance, piezo-electric materials convert mechanical stress into a flow of charge (current). Research into transducers like this have been combined with nanotechnology to build micro-electro-mechanical systems (MEMS) sensors that fit on a microchip.
Sensors that measure quantities related to the robot’s own state are called proprioceptive. Those that measure quantities related to its environment are called exteroceptive.
Passive sensors measure by means of a detector alone. Conversely, active sensors use an emitter with a detector.
A simple sensor is one that provides a signal that requires relatively little post-processing by the sensor support circuitry or decision-making device. Examples of simple sensors include the following.
are sensors that have only two states, typically instantiated as a circuit with contacts that close or break the circuit.
are touch sensors that are sensitive to pressure on or force through the sensor by piezoelectric transduction or resistance-based strain gauge.
are electronically resistive sensors, the resistance of which varies with light exposure; these are typically slow.
polarize light such that the light not parallel to the polarizing plane is filtered.
are sensors that detect light from an emitter (usually an LED) that is collected by a photodiode or phototransistor. These are much faster detectors than photocells. There are two types.
require the light to reflect off an object and return to the detector.
have their emitter and detector pointed at one another such that an object may interfere with the beam.
encoders, are used to measure the angular position of a shaft. These are typically optical and quadrature encoders that also indicate the direction of rotation. Basically, an emitter bounces two lasers off a spinning wheel with stripes offset \(90\) degrees from each other.
(i.e. “pots” or “rheostats”) are variable resistors. They often have a knob on them, the angular positions of which correspond to varying electronic resistance.
[a human body's sensors]Thinking about the human body as a very advanced robot can help us better design robots. Identify which of the above types of sensors one could say, by analogy, a human typically has.
For actionable information from a complex sensor, more support and potentially computation is required than for simple sensors. The following are important types.
can be used to detect the motion and especially the orientation of a robot. Gyroscopes used to be built as macroscopic flywheels, the angular momentum of which would maintain its orientation when mounted in gimbals. Today, MEMS mimic this behavior so that gyroscopes can be inexpensively and conveniently placed on a printed circuit board (PCB).
(i.e. “sonar”) sensors allow us to use echolocation in robotics. Sonars emit a chirp and measure the time-of-flight for the chirp to return. It’s great. Specular reflection is the reflection from the surface of an object being detected by sonar. Smooth surfaces are hard to detect because the waves can be completely reflected away from the detector. Rough surfaces are better. More sensors (in configurations called phased arrays) improve accuracy of sonar systems. For an illustration of sonar, see fig. in.se.2.

emit coherent beams of light, some visible, others not. Laser sensors can use the same time-of-flight principles as sonar to measure distance, but must use phase-shift information for short distances (because light’s pretty fast). Advantages of lasers are that they are faster than sonar, have good resolution, and have fewer specularity issues. Disadvantages include that they are much more expensive than sonar, bulky, and provide limited information (small beams!).
capture an image of a scene. Processing these images is a huge challenge.
processing attempts to find the edges in an image.
is the process of organizing an image into sections that correspond to an object in the image.
uses stored models to compare with features in images.
gives two views of one scene, adding depth and three-dimensionality to images.
Sensor fusion is the process of combining information for several sensors. An example of sensor fusion is the fusion of gyroscopic and accelerometer data to yield an accurate estimation of the orientation of an object. Gyroscopes can be used to measure the three-axis angular velocity of an object very quickly (their response is fast), but in order to determine the angle, the angular velocity must be integrated to get position. Unfortunately, this is plagued by an accumulation of error through time. However, the angular position can be measured quite accurately from a three-axis accelerometer by tracking the gravitational acceleration direction. The drawback is the accelerometer is slower to respond. In short, for this application, gyroscopes are fast but lose accuracy over time and accelerometers are slow but accurate.
Enter sensor fusion. A quick response and accurate estimation of the angular orientation can be found by techniques such as the venerable Kalman filtering.
A robot must be able to act on its environment. Common acts are in service of locomotion and manipulation, but there many others, like cleaning (e.g. vacuuming), cutting (e.g. CNC milling), and delivering material (e.g. 3D printing).
As is often the case when deepening our understanding of a device, following the flow of energy through it, a robot in this case, will help us better understand it. We start with where the robot gets its energy and follow this through its application to the environment in an action, as shown in fig. in.po.1.

Actions require energy, which is typically delivered on-demand from the electrical grid for stationary robots (typically manipulation arms) and delivered from an on-board battery for mobile robots. Some mobile robots can harvest energy (e.g. via solar panels), but the rate of harvest is typically much slower than is required for peak performance. Therefore, mobile robots tend to have energy limitations and battery technology is crucial for mobile robot development.
self-driving cars and batteries
Self-driving cars are typically electric and rely on large, rechargeable batteries, typically of the lithium-ion variety. Considerations here include energy storage capacity (vehicle range), power rating (vehicle power), recharge rate (driver waiting for recharge), self-discharge rate (when chilling), specific energy (J/kg), and lifespan.
Before a robot applies power to the environment, it must first first transform it into the appropriate form for its actuators (considered next). The two primary forms of electrical power are direct current (DC) and alternating current (AC). Batteries delivers DC power and the grid delivers AC. Some actuators take DC and others AC power.
In mobile robots, due to a reliance on (DC) battery power and the efficiency cost of DC-to-AC conversion, DC actuators are preferred. In stationary robots, like those for manipulation, AC power is plentiful, so both AC actuators and DC actuators (using AC-to-DC conversion) are used.
Further sub-forms of DC and AC power can also be identified, as outlined in fig. ¿fig:forms_of_electrical_power_for_actuation?. These sub-forms come about because most of the time actuators will need to be delivered variable quantities of power. For instance, switched DC power or pulse-width modulation (PWM) can be used to deliver variable average power to an actuator: by rapidly switching DC power on and off, the actuator average power is varied. This digital electronics technique is usually less expensive than the analog amplifiers required for truly continuously varying DC power. A drawback of switched power is that it introduces significant high-frequency noise, which can negatively impact sensors.
AC power also has sub-forms. Some high-power AC actuators require multiple phases, frequently three. In this case, three different signals with proper phase differences must be delivered. Other AC actuators operate at one steady-state speed per frequency of AC power. For changing speeds, this frequency must be varied—something achievable with a variable-frequency drive.

Actuation is a robot’s transduction of electrical power to the proper energy domain for its corresponding effector (considered next). Usually, this device is electromechanical. In fact, the paradigmatic actuator is the motor in its \(31\) flavors.
Most motors convert electrical power to rotational mechanical power, but some, called linear motors, convert to translational power. The fundamental mechanism in a motor is the Lorentz force acting on a wire surrounded by a magnetic field and through which electrical current is flowing. The varieties of motors are essentially different methods of arranging for this mechanism’s unfolding.
The following list describes some types of motors important for robotics.
are those that require DC power in its various forms (e.g. switched).
or brushed DC motors have a mechanical contact that reverses current flow. These are inexpensive but are less efficient than other types and require more maintenance due to brush wearing.
or permanent-magnet DC motors are brushed and have a background magnetic field generated by permanent magnets. These are relatively easy to model, but require feedback to control.
DC motors are brushed and have a background magnetic field provided by an electromagnetic coil.
or brushless DC motors are actually AC motors with complex built-in electronics that allow it to act like a DC motor. These are more-expensive and require expensive electronic controllers, but require less maintenance than BDC motors.
motors are DC motors that (usually) rotate a predictable amount for each DC pulse applied. The “usually” qualifier here means that for accurate position control, feedback is still required. These are fine for some position control, but are not great for continuous rotation or high speeds.
are those that require AC power in its various forms (e.g. multi-phase).
AC motors generate a rotating electromagnetic field that induces current to flow through an electrical loop in the rotor (the part that spins with the shaft). Again, the Lorentz force kicks in. In steady-state, there’s a difference called slip between the rotation rate of the electromagnetic field and that of the rotor. The speed of these motors is varied by changing the frequency of the AC power with a VFD. These are very common for large-load industrial applications.
AC motors generate a rotating magnetic field on both the stator (the part that doesn’t turn) via electromagnetic coils and on the rotor via either permanent magnets or DC electromagnets. Since they do not rely on magnetic induction, the rotor field and stator have the same angular velocity in steady-state (i.e. there’s no slip). If the rotor uses an electromagnet, brushes are required, with all their baggage. These can be more expensive than induction motors, but they can be also be driven by a VFD.
Another term frequently encountered here is servomotors, which has two common meanings. The first is simply most any of the motors aboveA possible exception here is a stepper servomotor.
of suitable quality for precise feedback control. The second is really a package: a motor, a speed measurement device (usually an encoder), and a feedback controller. Sometimes the controller is included and other times it is sold separately.
Since the desired effect of the actuator on the effector is frequently not simply rotation in the range of speed and torque of the motor, mechanisms frequently comprise the final stage of the actuator. This is the stuff of mechanical engineers’ dreams: gears, spools, pulleys, linkages, belts, tracks, power screws, etc.
It also means “to affect”—the robot’s environment in this case! Most of the time, this is a mechanical interaction. And interaction it is: let’s not forget Newton’s third law here; the robot’s structure and, if applicable, base, will experience reaction forces.
Devices actuators use to yield effects in the environment are called effectors,Affect is usually a verb and effect usually a noun, so you might be offended by the term “effector.” However, effect can be a verb. I looked it up.
which have direct interaction with the environment. Common effectors include pretty much all the locomotion devices considered previously and grippers, claws, feet, wipers, water jets, high-power lasers, sanding pads, and suction cups.
Consider a solar-powered rover bot for exploring the surface of Mars, illustrated in the figure.a solar-powered rover bot. (PR)

For the behaviors of (a) driving and (b) collecting a soil sample with an arm, trace the flow of power through the robot, and along the way identify energy storage elements, energy transducers, actuators, and effectors.
Solution
Intelligence is famously challenging to define, but that won’t stop us.
Intelligence is the ability to map perceptions to performant actions.
Let’s consider this definition specifically with regard to robot intelligence, a form of artificial intelligence. Here, perceptions are measurements, discussed in sec. in.se. Actions are with the robot’s environment (sec. in.po). The remaining qualifier here is performant: to perform well with respect to a metric.
Let’s consider this last requirement in more detail, with reference to fig. in.in.1.

If a robot action map did not have a metric, it would offend our sense of the meaning of the term “intelligence.” For instance, if a vehicle in locomotion perceived an obstacle, was mechanically capable of avoiding a collision, but did not, it would not seem intelligent. If one of its metrics is collision-avoidance, it performed poorly and looks dumb. If it didn’t have such a metric in the first place, it looks not-even-dumb. Stupidly, it was lacking an obvious aspect of locomotion.
The term goal or objective is frequently used here, in the sense that for something to be intelligent it must have one. But there is something more implied in the term “goal”: intention. It was the study of biology that first alerted us to the limitations of requiring intelligence to involve intention. Many biological systems exhibit what we would call intelligence, such as the flocking of birds as they fly together, without any sort of coordinated effort. In fact, flocking behavior can be replicated in groups of robots based on simple rules given to each robot. That is, a complex behavior that could be assigned a metric (e.g. flocking could be measured by the efficiency of group flying) can emerge without intention. This is called emergence, a topic that is perhaps more mysterious than is necessary.
Before we introduce some of the methods of artificial intelligence, it is worth considering some of its applications in robotics.
systems process image sensor data streams to construct actionable information. This includes object detection and internal model construction.
or simultaneous localization (of the robot) and mapping (of its environment) must fuse (sensor fusion!) vision and other sensor data. AI can contribute to this process.
is the process of planning the route the robot should take through an environment. For instance, self-driving cars use map data and GPS to plan its route.
can make the robot responsive to human speech and allow it to construct human-understandable speech.
The development of artificial intelligence (AI) has been so varied in method that summaries invariably and unjustly minimize entire fields of research. Therefore, instead of attempting a hierarchical organization, we will highlight a few ideas of particular interest.
The first is that of symbolic manipulation. Here intelligence is understood as the use of symbolic representations and rules of inference. For instance,
if there is a parking spot available on the street, park;
otherwise, circle the block.
There are several symbols here, e.g. a parking spot, the street, parking, block, circling. This approach has encountered formidable challenges, such as the signal-to-symbol problem of going from measurement signals to appropriate symbolic representations. In the example, it is challenging to determine from sensor measurements what is a parking spot. This approach also encounters the vast ambiguities in natural language; consider the multiple potential meanings of the sentence, “There’s a spot.” Natural language processing is now an entire field of AI.
Logical approaches to AI understand intelligence to be comprised of reasoning. Reasoning requires a knowledge base with semantic (i.e. meaningful) relations, so knowledge representations have been a significant aspect of this work. This approach features, for instance, the ability to make plans. In reality, nothing is certain, so logical methods have come to use probabilistic reasoning with, for instance, Bayesian networks. Another approach to uncertain reasoning is fuzzy logic in which elements can be in a set to a degree.
Beyond the minimum requirement set forth in our definition of intelligence, it is certainly a mark of intelligence to adapt or learning: to increase intelligence from experience. So, consider again the vehicle in locomotion and perceiving an obstacle it is mechanically capable of avoiding, now illustrated in fig. in.in.2. If it has as a metric to avoid obstacles, it might still hit the obstacle if its action map is insufficiently intelligent. Now consider if this map is trained on many obstacles such that it tweaks the map in accordance with its obstacle-avoidance metric. This would yield an action map the performance of which improves in intelligence. Taken broadly, this program is called machine learning, a leading strategy for developing artificial intelligence.

One method of machine learning uses large amounts of data to make inferences about what should be done, making it inherently statistical. A simple example here is the technique of regression: fitting a function to data by optimizing the function’s parameters.
Another machine learning approach is to train an artificial neural network, a mathematical operation that approximates the function of biological neural networks that are key to brain activity. Typically, a set of training data that includes labels (the “correct” answers, usually assigned by humans) is processed by the network, which adapts its parameters such that its output approaches the “correct” answers. Then labeled testing data, on which the network has not trained, tests to see how well the network performs on new data.
Relatively recently, a combination of advances in computing power and new approaches to using neural networks has been highly successful, surpassing previous performance metrics for many important applications (e.g. vision, natural language processing, game playing, etc.). The new techniques use multiple network layers and are collectively called deep learning (deep in layers).
A control system, which control theory studies, is comprised of a system to be controlled called the plant, a feedback measurement of the plant’s output, and a controller that determines the plant’s input given the feedback and some goal output. This is frequently represented in the block diagram of fig. ¿fig:typical_control_system_block_diagram?.

If it is successful at meeting performance goals, such a system meets all the requirements of artificial intelligence in our definition. Although control theory developed as a separate field from AI, it is in fact another form and is now generally recognized as such.
Control systems appear all over most robots as subsystems. For instance, a robot arm joint usually includes a motor (actuator), an encoder (sensor), and a controller. The plant, then, might be the motor-link assembly. A process in some higher-level controller that perhaps has planned the arm’s motion and performed an inverse kinematics calculation would send a command to the joint to rotate to a specific angle.
There may be objections at this point about our threshold for intelligence being too low. Some find it to so because they conceive of intelligence as being what is now called general artificial intelligence: a single AI system applicable to any problem. For instance, it would be capable of navigating a robot, having a conversation, and playing the cello. This is sometimes called strong AI, in contrast with the version considered above, now termed weak AI.
There is no strong AI, at present. However, if it does emerge, it is possible that it will develop beyond human intelligence rather quickly, into a state called superintelligence. There are ethical concerns here, with some potential for superintelligence becoming an existential threat to the human species.
We have claimed a necessary quality of a robot is that it is artificial, i.e. designed by humans. We include robots designed by robots designed by robots … designed by robots designed by humans. That is, as long as the original robot that begot further generations was designed by humans, these offspring are also considered artificial and therefore robots (if they also meet our other criteria for a robot). Robots designing robots—what does this mean?
A field of interest to many roboticists is that of artificial life, which is the interdisciplinary (biology, chemistry, computer science, robotics, etc.) study of life itself and its artificial creation. The term “life” has no universally agreed upon definition, but certain features have been suggested as necessary, such as the following.
is a tacit requirement for many people. Despite its apparent banality, this is perhaps not to be overlooked, for it is plausible that “the meaning of a word is its use in the language.”Wittgenstein and Anscombe, Philosophical Investigations.
This has been taken to heart by artists such as Theo Jansen, who has created strandbeests: wind-powered kinetic sculptures that walk on the beech and appear life-like. This perspective is limited, however, since it doesn’t elucidate the meaning of “life” to say that it is that which appears to be “life.”
is the process of local interactions of a disordered system yielding global order. Emergence in robotics is a form of self-organization. Examples of self-organization include ant colonies, crystal growth, and lasers.
is the process of an entity creating a copy of itself (perfect or not). Of course, these copies would (usually) also be capable of reproducing.
is the evolutionary process that requires both variation in self-replication and the natural survival and reproduction of those offspring that are better-adapted to the environment.
is the (fundamentally cellular) logical loop that posits its own constitutive self-environment boundary as being caused by itself.Varela, “The Emergent Self.”
Or, “life emerges when the external limitation (of an entity by its environs) turns into self-limitation.”Žižek, Less Than Nothing.
Others suggest no such general qualities of life can be established Wolfram, A New Kind of Science, 2002; Wolfram, “A New Kind of Science,” May 2017.
because our definitions are always relative to our own human perspective. One wonders, however, what more one could hope for from any definition.
Early researchers constructed abstract models of life from small sets of basic rules.
One such model is the cellular automaton, which is a set of (abstract) cells in a grid (of any finite dimension) such that each cell has neighbors: is adjacent to others. Each cell can be in one of a finite number of states. A set of rules determine the new state of each cell at each (discrete) time step from its previous state and the previous state of its neighbors. Therefore, in non-stochastic models, a given initial state or initial condition, together with the set of rules, results in a deterministic process.
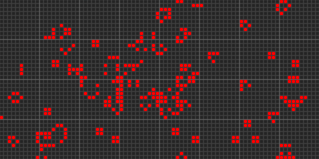
In Conway's Game of Life, a two-dimensional cellular automaton, the two states are taken to be simply “populated” or “empty.” The game has the following, simple rules:
For a space that is “populated”:
Each cell with one or no neighbors dies, as if by solitude.
Each cell with four or more neighbors dies, as if by overpopulation.
Each cell with two or three neighbors survives.
For a space that is “empty” or “unpopulated”:
Each cell with three neighbors becomes populated.
Somewhat surprisingly, very complex patterns emerge in this simple game. An example of what a game can look like is shown in fig. in.ar.1. Play it yourself, here www.conwaylife.com Or download the app Golly here: golly.sourceforge.net
One such cellular automaton is John von Neumann's universal constructor self-replicating “machine,” which works as follows.Von Neumann and Burks, “Theory of Self-Reproducing Automata.”
Consider an automaton system containing the following elements.
\(\phi_1\) of this system sans the description itself (for it cannot contain both itself and other automatons).
that can read a description of an automaton and construct it.
that can copy any description of an automaton.
that applies the constructor and copier.
Let the collection of the constructor, copier, and controller be called \(X_1\). Then the original machine is \((X_1,\phi_1)\). The controller commands as follows. It
commands the copier to make two copies \(\phi_2\) and \(\phi_3\) of the instructions \(\phi_1\);
commands the constructor to read \(\phi_3\) (thereby destroying it) and construct a new machine (sans instructions) \(X_2\); and
ties together \(X_2\) with the undestroyed copy of the instructions \(\phi_2\).
Now there are two machines, the original \((X_1,\phi_1)\) and its descendant \((X_2,\phi_2)\).
Lest we seem to be too far afield from robotics, let’s return to robots, proper, with their mechanical presences. We have examined how a robot might be considered intelligent—but alive? Some researchers not only think it is possible, they plan to make them.
For instance, the “Autonomous Robot Evolution” (ARE) project is designing an ecosystem for robot evolution.Hale et al., “The ARE Robot Fabricator.”
One of the key aspects of natural selection is competitive survival, which requires an arena. This project includes the creation of such an subsystem, along with several others, such as an ecosystem manager, a virtual environment, and a training environment.
This is one among several projects with artificial life as a goal. At this point, few have short-term ambitions to become mechanical, but the foundations are being laid.
Autonomy is our final essential condition for robots. As with some of the others, it is challenging to draw a line between devices that are and aren’t autonomous. Even if we were “hardliners,” there would be ambiguity: does autonomy include independence of human influence in all things? Consider the following aspects of robot behavior, considered as the behavior of a group or an individual robot:
the choice of robot(s) acting,
the action,
the timing,
the location,
the goal, and
the method.
Any of these six aspects could be autonomous, but it seems too strong to require all these to be autonomous; after all, isn’t one of our motivations for making robots having some influence on them? And there are more considerations, such as the programming, construction, and even design of the robot. Perhaps the only fully autonomous robot is an ideal robot approached in an evolutionary process of “alive” (à la artificial life) robots.And even here, one may object that the evolutionary process was started by humans, the conclusion being that a truly autonomous robot is, in fact, impossible.
Our perspective is that if any of the above is autonomous, that is sufficient to satisfy the condition of robot autonomy.
It turns out we would like to inhabit the same spaces as robots. In fact, one of our primary motivations for building robots is to have them help us. If you’ve ever been helped by someone over whom you have no influence, you’ll start to see the trouble with “fully autonomous” robots. What has proven more valuable in virtually every field of robotics is work that contributes to the better integration of human and robot activities. A way to consider the breadth of this field is to give it two categories.
is the broad and interdisciplinary study of the interaction of robots with humans, including communication, socialization, and design.
is the study of human-robot teams working together to achieve goals. It is sometimes considered a subcategory of HRI.
We will here explore HRC in more detail.
It has been observed that what is hard for a human is easy for a robot and what is easy for a human is hard for a robot. This is often understood as a challenge to human-robot interaction: humans tend to expect robots to be able to perform tasks simple to humans easily, so robots frequently seem downright inept. However, we can also turn this observation around: humans and robots are actually complementary.
The problem, then, is to find ways for robots to work collaboratively with humans—not necessarily replace them. There are, of course, several challenges, most of which have been revealed by attempts to design, build, and deploy collaborative robots. Other challenges were predicted by studying human collaboration to discern some essential qualities of collaboration that will likely remain true in successful human-robot collaboration. Before we consider some important ideas that have emerged from these studies, it is worth noting that, since humans find collaboration with humans on many tasks, like moving furniture, simple, we should expect that robots won’t. And this turns out to be very much true.
Collaboration requires team members share a common goal.
Collaboration requires members of the team to be committed to the achievement of the common goal.
Collaboration requires members of a team to internally represent knowledge of the states of the environment.
Collaboration requires team members be sensitive to the environment, each other, and themselves.
Collaboration requires team members to be able to communicate effectively, updating each other about the states of the environment and themselves.
Collaboration requires team members be able to plan; that is, to reason through which actions are required to achieve a common goal.
Relatively simple models of practical reasoning (e.g. belief-desire-intention or BDI,)Müller, “[Lecture Notes in Computer Science] Intelligent Agents v.”
and relatively detailed cognitive architectures (e.g. Soar,)Laird, The Soar Cognitive Architecture.
have been used to better design robots that can better collaborate with humans.
Several robot control architectures have been developed with insights gained from this work. We will review some important examples in.Ch:robot_control_architectures?
In robotics, we are interested in : objects that more-or-less hold together through time. Frequently we work with rigid bodies, those we assume do not deform. A notable exception here is a soft robot, which will include many highly deformable parts.
The study of bodies in space is called mechanics, the touchstone of mechanical engineering.We assume the reader is familiar with undergraduate-level Newtonian mechanics.
Mechanics is primarily the development of mathematical models of the motion of bodies and its causes. We distinguish between kinematic and dynamic models. Kinematic models (or just “kinematics”) describe the motion of bodies and dynamic models (or just “dynamics”) describe the relationship between their motion and its causes—!
The mechanical engineer typically studies mechanics in the following course contexts, roughly in chronological order:
At this point, the mechanical engineer might further study mechanics in certain applications such as aircraft, spacecraft, motor vehicle, submarine, vibration, and of course robot mechanics.Sometimes we use the terms “mechanics,” “statics,” and “dynamics” outside the context of mechanics, proper, and such usage can be understood as analogous. For instance, thermodynamics, heat transfer dynamics, electrostatics, electrodynamics, and system dynamics applied to electronic and thermal systems—none of these is strictly speaking mechanics in our sense; however, their governing equations share many similarities and are also of interest to the mechanical engineer.
We are interested in the kinematics of bodies. There are two branches of mathematicsHistorically at least, these are the two branches of mathematics.
of particular importance for these descriptions: geometry and algebra. Geometric objects of interest to us include the following:Bullo and Smith, Lectures on Robotic Planning and Kinematics, sec. 6.1; Siciliano et al., Robotics, ch. 2.
In contrast, the algebraic point-of-view has as its basic objects:
These algebraic objects will represent geometric objects. For instance, we’re all familiar with a (geometric) vector \(\boldsymbol{v}\) representation as an (algebraic) array: \[ \boldsymbol{v} = \begin{bmatrix} v_x \\ v_y \\ v_z \end{bmatrix} \qquad(mec.ki.1)\]
This algebraic representation has an important caveat: it is written in coordinates with respect to a specific reference frame \(x\)-\(y\)-\(z\). It is this quality of algebraic representations that separate them so fundamentally from geometric representations, which are independent of a specific reference-frame.
As one would expect, each representation has its associated concepts and relations; for instance, geometry has angles, curves, and manifolds, whereas algebra has transposes, linear maps, and eigenvalues. Many of our analytic tools are algebraic; however, it is usually easier conceptually to work with geometry.Our intuition is usually better for geometry than algebra. Furthermore, we often strive to write physical laws in coordinate-independent forms—geometry rather than algebra—in order to express them in greater generality.
With these mathematical tools, we can describe the following, of particular importance to kinematics:Bullo and Smith, Lectures on Robotic Planning and Kinematics.
The of a rigid body in space is completely described by a vector representing position and a vector representing an orientation. We call this description a body’s pose.Siciliano et al., Robotics, ch. 2.
We call the minimum number of coordinate variables required to describe the pose of a body its (DOF). Generally we require three position coordinates and three orientation coordinates such that a body has six degrees of freedom. However, constraints frequently reduce this number. For instance, we are accustomed to treating certain bodies as being constrained to “the plane,” meaning it has two positional degrees of freedom and one orientational degree of freedom—so, three degrees of freedom in toto.
Describing the state of a system of multiple rigid bodies is a matter of accounting for the pose of each. Therefore, in the general case of \(n\) bodies without constraint, the system has degrees of freedom.
A robot’s workspace is the Euclidean space (sometimes taken to be \(\mathbb{R}\) or \(\mathbb{R}^2\) but really \(\mathbb{R}^3\)) accessible to the robot considering its geometry, constraints, obstacles, etc.If the robot is a manipulator, the workspace is typically taken to be the space reachable by its end-effector. For more, see Siciliano et al., sec. 1.2.1.
The aggregation of rigid body poses in a system is called the system’s configuration. More precisely, a robot’s configuration \(q\) is the minimal set of coordinate values (in number, equal to the degrees of freedom) that describe the poses of all its rigid bodies. Similarly, a configuration space is the set \(Q\) of all possible configurations, subject to constraints. The configuration space is not the workspace, which corresponds to the volume of actual mechanical space; the configuration space is an abstract space of possible coordinate values!
Joints among rigid bodies are connections that constrain their relative motion. The most common types of joints constrain relative motion to a single degree of freedom. If a joint constraints to only translational relative orientation, it is called ; if it constrains to only orientational relative motion, it is called . Single degree of freedom joints are always one or the other. Conventional schematics of each are shown in fig. mec.ki.1.

|

|
Figure mec.ki.1: Conventional revolute and prismatic joint schematics. a — prismatic joints, b — revolute joints
When rigid bodies are connected via joints, we often refer to them as links. Links are often shown schematically as lines, as we’ve indicated with the orange lines in fig. mec.ki.1.
It is also possible to have a joint between a body and a reference or “ground” in space. Typically this is taken to be fixed.
Recalling that the degrees of freedom of a body are the minimum number of coordinate variables required to describe its motion, and realizing that a joint reduces the relative motion of two links, we can see that joints tend to the degrees of freedom of a system of rigid bodies. In most common case of a manipulator robot with a single sequence of \(n\) links connected with one-DOF joints, with one end joined to ground and the other free, each link adds only a single degree of freedom (out of its potential six). So the entire sequence of \(n\) links has only \(n\) degrees of freedom.
What we have just called a “sequence” of connected links is called a .Siciliano et al., Robotics, sec. 2.8.
The example of a chain of \(n\) links connected be one-DOF joints, joined to ground at one end and free at the other is called an open chain. Robots with such configurations are sometimes called serial. The free end can have various tools attached (e.g. paint sprayer, cutting tool, gripper, etc.) and is called the end-effector.Recall from sec. in.me that an effector is a part of the robot that interacts directly with the environment.
Consider if the end-effector is moved to some intermediate link in a chain and both ends connected to ground (usually displaced from each other). This is called a closed chain. A robot with a closed chain is sometimes called parallel, although the type we introduce next would more frequently receive this label.
Consider the fact that at times a joint connects more than two links. Kinematic chains with these joints can have multiple “branches” (chains themselves). Frequently, one or more of these branches will not have a free end—rather, they connect to another branch or, most often, connect to some ground location. A robot with only closed chains and one or more end-effector on intermediate link(s) is called parallel. These types of considerations of robot links and joints are called topology—for instance, serial and parallel are two different topologies.
As is summarized in tbl. mec.ki.1, the performance (and therefore applications) of the serial and parallel topologies are quite different. New performance considerations in the table are defined as follows.
Payload : refers to the ability of a robot to move massive loads.
Speed : refers to how quickly a robot can change its configuration.
Dexterity : refers to how changeable is its configuration.
| serial | parallel | |
|---|---|---|
| payload | low | high |
| speed | slow | fast |
| dexterity | high | low |
| workspace | large | small |
Sometimes considered part of a kinematic chain itself and other times considered part of the “end” of an open chain, a wrist may be part of the topology of a robot, especially when dexterity is important. A wrist is usually composed of one to three short links joined by revolute joints. The primary purpose of a wrist is to change the configuration of the end of the kinematic chain, which is particularly important in many manipulation tasks.
The calculation of an end-effector’s pose as a function of the configuration coordinates is called direct kinematics. Consider what this means for a typical open chain robot manipulator. In some configuration, the links each have a pose, but the pose is not explicitly given in the configuration: rather, the poses can be calculated by starting at the grounded end of the chain (a known position) and given each joint’s coordinate(s), the pose of each successive link can be derived.
This problem turns out to be reasonably straightforward with linear algebra via the concatenation of linear maps called rotation matrices. See Bullo and SmithLectures on Robotic Planning and Kinematics.
for a nice introduction, Siciliano et al.Robotics.
for thorough derivations, and Bullo and LewisGeometric Control of Mechanical Systems.
for a mathematically rigorous treatment.
The problem is that if we would like the end-effector to be in some specific pose, how can we determine a corresponding configuration? This is the problem of inverse kinematics. As you can imagine, it’s a very important problem because what we can directly control in a robot are its actuators, usually motors at joints. That is, we can only directly control the robot’s configuration, not the pose of its end-effector, which must be indirectly controlled through the configuration.
This inverse problem is usually nonlinear, large (many variables), and may have multiple, one, or even zero solutions!
Fortunately, there are excellent numerical solvers for this problem. However, these are far from a magic bullet and must be approached with caution.
A deeper look at kinematics
In the next section (sec. mec.tf), we consider coordinate frame transformations. For a deeper look at various aspects of introductory kinematics, consider studying the final four chapters of Bullo and Smith,Lectures on Robotic Planning and Kinematics.
potentially in its bük form. See Siciliano et al.Robotics.
for thorough derivations of some specific but useful problems, and Bullo and LewisGeometric Control of Mechanical Systems.
for a mathematically rigorous treatment.
Different rigid bodies have different convenient coordinate systems. For instance, a mobile robot might have a body-fixed coordinate system with origin at its geometric centroid, \(x\)-axis pointing forward, \(y\)-axis pointing leftward, and \(z\)-axis pointing upward. Locating an object in this coordinate system would be different than that of, say, a base station. Consider for a mobile robot a two-dimensional body-fixed coordinate system \(o\), world coordinate system \(w\), and a pseudo body-fixed coordinate system \(p\) that is merely a translation of the world coordinate system to the \(p\) origin—see fig. mec.tf.1.

Let a point in space in \(w\)/\(p\)/\(o\)-coordinates is represented by the position vector \(\boldsymbol{r}_w\)/\(\boldsymbol{r}_p\)/\(\boldsymbol{r}_o\). Let \(\boldsymbol{t}\), be a vector from the \(w\)-origin to the \(p\)-origin.
Suppose the robot can only translate and not rotate. The \(w\) and \(p\) coordinate transformations are sufficient to describe its motion. The transformation is
\[\begin{aligned} \boldsymbol{r}_w &= \boldsymbol{r}_p + \boldsymbol{t} \\ \boldsymbol{r}_p &= \boldsymbol{r}_w - \boldsymbol{t}. \end{aligned}\qquad(mec.tf.1)\]
As we will see in a moment, rotation of a vector is described by a matrix operation on a vector. It is therefore convenient to write translation as a matrix operation in one extra dimension:
\[\begin{aligned} \boldsymbol{r}_w &= \begin{bmatrix} 1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1 \end{bmatrix} \boldsymbol{r}_p \\ &= \underbrace{\begin{bmatrix} 1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1 \end{bmatrix}}_{T} \begin{bmatrix} r_x^p \\ r_y^p \\ 1 \end{bmatrix} \\ &= \begin{bmatrix} r_x^p + t_x \\ r_y^p + t_y \\ 1 \end{bmatrix}.\end{aligned}\]
The last component, then, becomes an accounting tool for writing the translation operation in this form—called a homogeneous representation.Bullo and Lewis, Geometric Control of Mechanical Systems.
The transformation matrix \(T\) translates but does not rotate.
Show that \(\boldsymbol{r}_p = T^{-1} \boldsymbol{r}_w\) by showing it to be equivalent to (mec.tf.1).
Transformation to and from a body-fixed coordinate system is usually a rigid body transformation: one that changes coordinate frame origin position and orientation, but preserves the Euclidean distance between any two points. Transformations between the \(w\) and \(o\) coordinate systems, above, are rigid body transformations. These could be represented as a rotation matrix \(R\) transformation followed by a translation by \(\boldsymbol{t}\): \[\begin{aligned} \boldsymbol{r}_w &= R \boldsymbol{r}_o + \boldsymbol{t}.\end{aligned}\] Here, \(R\) rotates counter-clockwise by \(\theta\) with matrix \[\begin{aligned} R &= \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix}.\end{aligned}\]
However, we frequently like to write this in a homogeneous representation, as well, again adding a component to the vectors such that \(R\) becomes \[\begin{aligned} R &= \begin{bmatrix} \cos\theta & -\sin\theta & 0 \\ \sin\theta & \cos\theta & 0 \\ 0 & 0 & 1 \end{bmatrix}\end{aligned}\] and the rigid body transformation becomes \[\begin{aligned} \boldsymbol{r}_w &= T R \boldsymbol{r}_o.\end{aligned}\]
Rotation transformations, such as \(R\) above, come in a variety of flavors.
These rotations are described by the sequential rotation about a (typically) body-fixed coordinate system. The order matters because rotating about one axis changes the direction of the others! Not one, but several conventions exist for Euler angle rotation.
Similarly, rotations can be described about axes the origin of which remains fixed to the body, but the orientation of which remains fixed to the world frame.
Axis-angle representations describe a rotation as a unit vector and an angle of rotation about that vector.
Quaternions are complex numbers with a real part and three (instead of the usual one) imaginary parts. They can describe rotations in a manner that avoids certain problems (e.g. gimbal lock and ill-conditioned quatities) of other representations and is more computationally efficient.
The non-quaternion rotation transformations use matrix multiplication and can therefore have homogeneous forms that include translation. Quaternions cannot represent translations, so vector-addition must supplement (multiplicative) quaternion transformations.
A decent amount of robotics can be done with kinematics alone. With inverse kinematics and a dash of feedback control, we can even control a robot’s motion by prescribing its joint actuators to move to a given configuration. However, a robot designer would have many important questions unanswerable by kinematics. These include the following.
All these pertain to force and acceleration—that is, dynamics. A dynamic model can help answer these and many related questions important to the designer.
You may have noticed that one of the questions above pertained to the robot’s safety for nearby humans. In some highly controlled environments, this may seem less important, but as robots interact more with humans, working collaboratively, it becomes paramount.
With a kinematics-only model, is the only option.Technically force and torque control are possible without a dynamic model. However, it is virtually impossible to design a force-controlled robot without a dynamic model.
This means the joints are commanded to try as they might to match the commanded configuration. If something unforeseen arises, like an obstacle, the robot may deliver a great deal of force or impulse to that obstacle, resulting in a great deal of damage to the robot, obstacle, or (god forbid) person.Death-by-robot has occurred on many occasions, sadly. This is far from being superfluous to be concerned with.
This greatly limits the possibilities of application for a position-controlled robot.
Fortunately, there’s a better way: force control. Force control uses force and torque sensors as feedback and commands force and torque in lieu of position. Robots with force control are usually much safer. However, specific configurations are still important control goals, so a mixture of the two types is usually necessary.
It turns out there are several ways to formulate Newtonian dynamics. There are three important variations.
This is a systematic version of the familiar summing of forces causing translational motion, called the Newton equation, and summing of moments causing rotational motion, called the . Each link contributes one of each to the set of equations of motion. Solution of these equations proceeds by recursively solving for link velocities and accelerations (translational and rotational), then backpropagating these to solve for forces and torques. This method has the advantages that it is based on the traditionally taught formulation and is computationally efficient; however, it is somewhat more complicated to set up.
This formulation is coordinate-independent and relies on a special function called the \(L\) that is the system’s kinetic energy \(T\) minus its potential energy \(U\), i.e. \[
L = T - U.
\] One way of formulating thisThere are a lot of details we’re skipping here, but see Siciliano et al., Robotics for a version that uses “generalized” coordinates and Bullo and Lewis, Geometric Control of Mechanical Systems for one that uses “natural” coordinates and differential geometry.
is in terms of time \(t\), positions \(\boldsymbol{q}\), and velocities \(\boldsymbol{v}\) such that \(L(t,\boldsymbol{q},\boldsymbol{v})\). The formulation then proceeds via the calculus of variations—a mathematics of path optimization—why? Because the Euler-Lagrange equations of motion are a necessary condition for least action, where action \(A(L)\) is an integral function of the Lagrangian along paths. This is an example of the oft-relied upon principle of least action that has had conspicuous success in deriving mathematical models of physical phenomena. The principle leads to the following necessary condition for least action, called the Euler-Lagrange equations \[
\frac{\mathrm{d}}{\mathrm{d} t}\left(\frac{\partial L}{\partial v^i}\right) - \frac{\partial L}{\partial q^i} = 0 \qquad i \in \{1,\dots,n\}.
\] This is a set of \(n\) equations of motion. This formulation has the advantages that it is relatively straightforward to deploy and can be extended to flexible bodies; however, it does not lend itself to computation the way the Newton-Euler formulation does.
A Hamilton formulation has its own function of kinetic \(T\) and potential \(U\) energy of the system called the \(H\) defined as \[
H = T + U.
\] As with the Lagrangian, derivatives of the Hamiltonian yield the equations of motion. An excellent and advanced treatment of Hamiltonian mechanics for control is given by Bloch, Krishnaprasad, and Murray.Nonholonomic Mechanics and Control.
In the direct dynamics problem,For an accessible yet thorough treatment of direct and inverse dynamics, see Siciliano et al., Robotics, sec. 7.6.
we solve the usual dynamics problem, formulated here in terms of a configuration vector \(\boldsymbol{q}(t)\): what accelerations \(\ddot{\boldsymbol{q}}\), velocities \(\dot{\boldsymbol{q}}\), positions \(\boldsymbol{q}\), and end-effector forces will the system have through time when it starts with an initial condition (\(\boldsymbol{q}(0), \dot{\boldsymbol{q}}(0)\)) and subjected to prescribed forces and torques (typically applied by joint actuators)?
Solving this problem is essential to the simulation of a robot and is therefore extremely helpful for robot design.
In the inverse dynamics problem, we solve instead for the actuator torques and forces required for a given configuration \(\boldsymbol{q}(t)\), velocity \(\dot{\boldsymbol{q}}(t)\), acceleration \(\ddot{\boldsymbol{q}}(t)\), and end-effector forces.
Solving the inverse dynamics problem is important for configuration trajectory (position and velocity) planning and control, especially force control because it connects trajectory with force and torque.
Robot control architectures are conceptual structures for organizing robot control such that we can design controllers systematically. All such architectures include maps of measurements to actions, a process that was central to our definition of intelligence (sec. in.in). We call this process sense-decide-act (SDA). With reference to fig. co.in.1, sensing (measurement) provides the robot with information about the state of itself and the environment; from this, a decision is made about how the robot should act; finally, the robot acts. The differences among robot control architectures lie almost entirely in the decide step—that is, in the controller.

The “controller” here is not necessarily a single device, although it can be. Control devices are frequently microcontrollers that include microprocessors, memory, and input/output interfaces. However, some control logic is so simple, it can be instantiated in analog- or digital-circuits alone. It is also notable that the diagram of fig. co.in.1 encompasses processes that can be happening asynchronously and in parallel. For instance, measurements may be made at different times, controller decisions may take different times for different situations, etc.
From our understanding of feedback control theory,We assume the reader has at least a cursory understanding of feedback control theory. If not, please review Chapter 01 of our Control: an introduction.
we can conceive of how we might control simple robot actions, such as turning by some angle or raising an effector to some height. While feedback control systems of complex systems (like a robot arm) can be very complicated, they typically require low-level commands, i.e. a goal state through time.
As necessary as feedback control is, it is inadequate to command the robot to perform complex actions, such as finding an object or exploring an environment—i.e. high-level commands. But just such high-level commands are what a designer would like to give a robot. Sometimes, we say there are mid-level commands as well, those that require more than low-level commands, but are probably lower-level than a robot designer would like to give. In fact, we can categorize actions by command complexity.
are those that require only low-level commands. For instance, moving an effector to a given state is a simple action.
are actions that require only mid-level commands. For instance, grasping an object in a gripper is a task.
are actions that require only high-level commands. For instance, following walls is a behavior.
These categorizations are helpful, as we’ll see, despite their ambiguity.
Some robot control architectures use internal models to help the controller to decide what to do. There are models of the robot and models of the environment. They are typically mathematical models, maps of the environment, or mechanical solid models. Models, of course, need epresentations that can be stored in computer memory. However, models useful in many robot control applications take a lot of memory (i.e. they are memory-intensive), which is only the first of three major drawbacks. The second is that using the models is processing-intensive, which costs power, money, complexity, and most importantly time. The third drawback is that these internal models don’t age well and usually require constant updates in a dynamic environment.
Despite the drawbacks, however, models are very helpful, especially when the robot is to be designed to exhibit a behavior that requires multiple steps to be effective. For instance, it’s not hard to go from location \(A\) to location \(B\) when there are no obstructions: just go toward \(B\). However, if there are obstacles, it is more-difficult, and if there is a labyrinth—a map would surely help!Models will be discussed in greater detail in sec. co.de.
Another distinction must be made: there is a model for design and a robot’s internal model for runtime. During design, modeling a robot is absolutely essential and the runtime drawbacks mentioned above are fairly irrelevant.
There are four common robot control architectures.
Deliberative control makes extensive use of stored information and models to predict what might happen if different actions are taken, attempting to optimally choose a course of actions. This allows the robot to plan a sequence of actions to achieve complex goals (exhibit a behavior), thereby allowing a designer to give high-level commands that are interpreted in terms of extensive models. This paradigm is often called sense-plan-act, thereby substituting “plan” for “decide” in our usual scheme. In essence, deliberative control decides actions through careful planning. Deliberation is costly in terms of the hardware required, the energy used by computation, and, most importantly time. Even with seemingly ever-increasing processing power, time remains the bottleneck for deliberative control. “Pure” deliberative control is rarely used, as we’ll see, but it is nonetheless indispensable for some behaviors.
Reactive control is rather elegant in its simplicity: simple rules map sense data to simple actions, but in combination these rules interact to generate task-level actions. Or perhaps it’s better to say a designer arranges these simple rules to achieve modular task-level actions. The most common variety of this architecture is the subsumption architecture, which uses the concept of layers, which can affect (subsume) each other in limited ways we’ll explore. Layers can frequently be constructed to yield task-level actions, but usually more is required to exhibit full-blown behaviors (again, these categories are fuzzy).
In hybrid control, a wedding is held for deliberative and reactive control in the hopes that each’s positive qualities will be brought forth and negative qualities will be left behind. This is probably the most popular approach, but it is very challenging to arbitrate between or mix the two approaches in such a way that it doesn’t comprise an unhappy union. Popular tasks for reactive control are danger-zone shutdowns, obstacle-avoidance, and pretty much any activity that requires a quick … reaction. Left to deliberative control are the high-level decisions that aren’t too time-sensitive, such as path-planning, object recognition, and task coordination.
Behavior-based control tries to extend reactive control beyond tasks to behaviors. This is really an attempt to design emergence, a behavior that is not explicitly commanded, but is comprised of simple actions running more-or-less in parallel. As we will see, reactive and behavior-based control rely heavily on lessons learned from biology, especially evolution and emergence.
Each of these robot control architectures is explored in this chapter. Later, we will consider how to instantiate these in software and hardware, simulated and mechanical.
“Deliberation” connotes a complex process. In the sense-decide-act robot control schema, it means the “decide” step includes so much complexity that we now call it —that is, sense-plan-act.In a sense, the difference between “deciding” and “planning” is only in quantity; however, the adage, “Sometimes quantity has a quality all its own,” seems to apply.
This planning often takes the form of extensive modeling of the robot and environment that extends into the future.
Early robotics, under the influence of early AI, was focused on this type of robot control. Major drawbacks that quickly emerged were the large and constant deprecation of environment models (in changing environments).Other limitations include the large amounts of computer memory to store model representations and the high computer processing demands for their use.
The architecture of reactive control (sec. co.re) was introduced to solve these and other challenges for deliberative control; however, planning remains indispensable for modern robots.
Models of a robot and models of its environment are usually quite different. The primary difference is that usually an environment model is except in that it may be updated from measurements.Of course, environments can change appreciably, so the validity of an old model can be suspect.
For mobile robots, such models are often in the form maps, spatial models of the environment. Planning with such a model usually takes the form of planning routes from one location on a map to another.
In contrast, a robot’s self-model is usually time-varying in that its state is constantly being updated via measurement. Moreover, a self-model is usually mathematical, and sometimes even dynamic in the sense of Newtonian mechanics. This provides a distinct advantage for planning: a mathematical model will typically give the robot foresight. A robot can thus plan its actions in such a way as to make likely the achievement of its goals. Foresight is, of course, a key aspect of intelligence.
Consider a controller with a model of itself and its environment. The set of all possible statesIt is important to keep in mind the distinction between a model state, which is a representation, and an actual state of affairs. A detailed analysis reveals that measurements (that inform models) and states of affairs are not in fact independent. With this qualification, we can still say a good model is “close enough,” despite the risk of vacuity here.
for the robot-environment can be considered a state space, one of which can obtain at a time. Many planning problems consist in selecting a path through this state space. If we include a time metric along the path, it is called a .
As illustrated in the figure,An illustration of several possible paths from state \(s_1\) to state \(s_2\) in a robot-environment state space. 
path or trajectory through this robot-environment state space starts at an initial state \(s_1\) and ends at another \(s_2\), sometimes called the . This might be a mobile robot moving from one location to another or it could be a manipulation robot changing configuration. In any case, the path from state \(s_1\) to another \(s_2\) is a sequence (potentially infinite) of intermediate states. Planning, then, consists primarily in choosing this sequence of states.
A planning problem can have one, many, or even zero solutions! Usually, there are many and the question becomes, which path is best? To answer, we need metrics such as path duration, path length, preferable subsets of the state space, etc. What the planning problem frequently amounts to then is path optimization.
Optimization is like a whole thing. It is an area of specialization in mathematics, artificial intelligence, and control theory—and all of these play roles in robotic planning.
A deeper look at planning
Planning is a large topic. Consider a deeper look at planning by studying the first five chapters of Bullo and Smith,Lectures on Robotic Planning and Kinematics.
potentially in its bük form.
Robot control that is characterized by sense data being simply mapped to simple actions that work together to achieve tasks is said to have a reactive control architecture. By “simply mapped,” we mean a long calculation is not required to determine the appropriate action. Frequently, the maps are simple rules like, “If \(s\) then \(a\).” For instance, “if a dropoff is detected ahead, stop.” This structure is called a finite state machine (FSM). A FSM models a robot-environment “world” as consisting of a finite number of states, exactly one of which exists at each moment. State transitions occur from one state to another when some conditions are met. In the case of “If \(s_1\) then \(a_1\),” we define a state transition function (map) \(f_1\) that maps (sense) event \(s_1\) to action \(a_1\), which presumably will change the actual state to some (usually) new state \(s_2\).

For simple actions, it is easy to see how these maps work. For more-complicated actions, especially those involving long sequences of simple actions, it is not so clear how to go about designing such maps. This is especially true when we consider the frequently large number of possible states in which the robot could be: for every position, orientation, speed, distance from objects, etc., actions must be specified. In other words, the state-space is usually large and if we imagine, as designers, assigning an action to each state … we see the trouble: there are too many possible states to choose an action for each. In other words, the problem is usually intractable.
One approach is to break the state-space into subspaces and assign actions to these, instead of individual states. But a further complication here arises: what if the subspace domains of these maps aren’t mutually exclusive? Consider fig. ¿fig:two_overlapping_subspaces_with_corresponding_action_maps?.

In the region of overlap \(S_1 \cap S_2\), both \(f_1\) and \(f_2\) apply, leading to different actions \(a_1\) and \(a_2\). Sometimes there is no conflict and both actions are desirable (and non-conflicting); other times, only one or the other is desirable, so arbitration is necessary; finally, sometimes a fusion is desirable in which the original actions are mixed in some way. For instance, perhaps \(S_1 = \{\text{an object is on the left}\}\) and \(S_2 = \{\text{an object is on the right}\}\). In, for instance, a corner of a room, both will be true, so the state \(s \in S_1 \cap S_2\) obtains. If \(a_1\) is “continue and angle right” and \(a_2\) is “continue and angle left,” which seems reasonable, something must be be done because there is clearly a conflict here. If we proceed by arbitration, either \(a_1\) or \(a_2\) is chosen, but neither is probably desirable. We could proceed by a simple fusion in which we simply “add” the two actions (programmatically and not electro-mechanically, which would waste of power and could cause damage to the robot): the robot would just continue forward. No, instead, we probably want what could be considered a new subspace-function-action or a more complex fusion, something like “stop, rotate by some angle, and continue.”
But even if a designer could go through each subspace and assign it an action in a reasonable amount of (design) time, which actions (and arbitrations) should they choose in each state to consistently achieve desired tasks?
To even further complicate things, the state of the robot must be estimated from measurements, from which it is not always possible to completely or accurately reconstruct the state. And even when it is possible, the estimation process can be model-dependent and therefore it may take (run) time—something generally discouraged in a reactive control architecture.
These challenges indicate a systematic design approach. This is provided by the subsumption [reactive] architecture (SA), to which we now turn. But before we describe its structure, it is worth considering some of its fundamental design principles.
The motto,Brooks, Cambrian Intelligence.
The world is its own best model
is one of the fundamental principles of the SA and other reactive architectures. The idea here is that it is better to get information about the world from itself than from models thereof—that is: measure it, and now! This means the SA relies very little on models and computation. For instance, consider a robot performing the three-action task \(T_1\): (\(a_1\)) pick up an object; (\(a_2\)) open the hatch; and (\(a_3\)) place the object inside. We could reason as follows: when we pick up an object, open the hatch, then place the object inside. That is, \(a_1 \Rightarrow a_2 \Rightarrow a_3\). The implicit assumption, here, is that we know how things will go. But the world is a fickle place, my friend. The object was slippery and part way through being picked up (\(a_1\)), it was dropped, and nothing was placed inside! Or the hatch got stuck (\(a_2\)) and our manipulator crashed into it (\(a_3\))! However, using the principle that the world is its own best model, we would not rely on such (FSM) logic. Instead, we might use realtime sensor information, interpreted as events, say
\(s_1 = \{\text{sensed an object to pick up}\}\),
\(s_2 = \{\text{sensed an object near the hatch}\}\), and
\(s_3 = \{\text{sensed the hatch is open}\}\).
Then events would proceed as follows:
if \(s_1\) then \(a_1\) (should cause \(s_2\)),
if \(s_2\) then \(a_2\) (should cause \(s_3\)), and
if \(s_3\) then \(a_3\).
This is much more resilient; if, for instance, the hatch gets stuck, then \(\neg s_3\) and therefore \(\neg a_3\)—that is, the manipulator would not crash into the hatch.This simple example ignores the obvious fact that even a non-reactive control architecture would probably make more extensive use of sensor data than imagined here. Similarly, the “model” here is a simplistic FSM logic: if action \(a_i\), then the event I expect will certainly follow. Most models would be more nuanced and be updated from sensor data; however, added model detail leads to slower responses.
At this point, we can see another way of thinking about this design principle: it is as if communication among the modules that act is channeled through the world itself. Instead of communicating among modules through software or hardware signals, the results of each of one’s action in the world (environment-robot) are simply there and need no other “model.”
Although this principle was originally developed by the founders of the reactive control architecture, it has really become a general design principle in all robotic control. And let’s not kid ourselves: it has its limitations. The most significant limitation is temporal: sometimes the past and the (modeled) future are relevant to what actions are best taken now. Furthermore, sensor data is imperfect and incomplete: although we have said the world is “simply there,” this is actually a fantasy, and we always have to estimate what is going on from measurements. It is more honest to say “it is easier to measure most things than to model them.”
The next design principle of the subsumption architecture is
Start with the simplest actions. I.e.—design bottom-up!
The apparent banality of this is deceiving: it is easy to get stuck thinking about “high-level” behaviors when we begin designing. While we cannot forget that these are the goal, in a subsumption architecture (and beyond), the simplest actions are first. The next principle is related:
Iteratively include more actions, debugging along the way.
The idea is to try to form more-complex tasks by including more actions. How might these actions combine? The following design principle begins to answer this question:
Higher actions can override lower ones.
We mean “higher” in a sense already alluded to, but which will become more precise in the next section. Given our bottom-up approach, lower-levels are designed early and higher-levels are designed later. In this sense, the subsumption architecture design process follows biological evolution, which starts simply, builds incrementally, and overrides selectively.
Now consider the final design principle:
Complex tasks emerge from combinations of simpler actions.
This is a sort of “promise” that complexity can be achieved by following these design principles: it is reasonable to expect emergence. Given the success of this architecture in many robot applications, it seems well-founded.
The subsumption architecture uses a type of finite state machine (FSM) model.Brooks uses some nonstandard terminology here that can cause confusion. He calls the fundamental building unit of the subsumption architecture an “augmented finite state machine” or AFSM. By “state machine,” he seems to mean what we have called a state transition function and action. By “augmented,” he seems to mean the inclusion of a regular transition-action, registers, timers, and connections thereamong (Brooks, Cambrian Intelligence, 30).
Transition functions map subsets of the state-space among each other.
Design proceeds incrementally by module aka layer, each of which contains one or (usually) several state transition function definitions. A layer is designed to achieve a task like “stand up” or “drive forward” or “wander.” Layers are stacked “up,” with the higher layers having two privileged capabilities over lower layers:
A higher layer can suppress (turn off) one or more of a lower layer’s input(s).
A higher layer can inhibit (turn off) one or more of a lower layer’s output(s).
This provides a great deal of flexibility in the design process. For instance, consider mobile robot with two layers: a layer \(L_1\): wander and a higher layer \(L_2\): avoid obstacles. Most likely, it will be necessary for \(L_2\) to inhibit at least some of the outputs of \(L_1\), with \(L_2\), doing its best impersonation of Jesus, “taking the wheel,” if you will.
It is worth mentioning that many reactive architectures have been developed from some or all of the principles of the subsumption architecture. In particular, the behavior-based architecture of sec. co.be is a direct extension thereof. Others, such as SMACH (wiki.ros.org/smach) from the Robot Operating System (ROS).Rin?
SMACH uses what is called a hierarchical state machine that has several advantages.
All the high-level considerations ofPart:introduction_to_robotics?
have to be instantiated somehow. How do we keep track of the state of robot? Implement a controller? Communicate among robots? Interface with a user? The answer is almost always: (with difficulty and) with computers. And we know what that means: software.
As we saw in,Part:introduction_to_robotics?
robots are complicated. Can you imagine the amount of software required to run a given robot? A ton. Not to mention the expertise in several sub-fields within robotics. In the late 2000s, roboticists started the difficult but important task of collaboratively developing an open-source software framework that can be used to program many different types of robots: the Robot Operating System (ROS).Quigley et al., “ROS.”
ROS is a framework in that it brings together code libraries, code tools, and development conventions to create a system in which individual applications can be developed. Many robotics researches share their expertise and development work via this framework, which means (among other things) cutting-edge libraries are available to everyone.
We adopt this platform, which is now ubiquitous.
ROS has several key aspects to its methodology that are worth considering at this point.
ROS nodes are software modules running on potentially different computers. Nodes communicate by sending messages over a network peer-to-peer (P2P) – that is, directly to each other. This lack of centralization is very flexible and scalable. Nodes, messages, and related concepts are described further in sec. ¿sec:ros_graphs?.
ROS systems can easily interact with software tools for visualization, navigation, data logging, etc. This strength allows ROS to remain focused on its core tasks.
ROS programs can be written in several languages, including Python, C++, and Matlab. The most popular are Python and C++, and we will use the former.
The development of ROS programs with a specific language is enabled by a language-specific client library. All but the Python (rospy), C++ (roscpp), and LISP (roslisp) client libraries are considered experimental.For more client libraries, see wiki.ros.org/Client Libraries.
ROS developers (you!) are encouraged to write their programs in a modular manner such that each module performs some limited task, then composing several modules to perform more-complex tasks. This makes debugging, maintenance, and collaboration much easier.
Previously developed ROS programs are available in the default ROS installation and in the form of additional packages. We will discuss packages more in.Ch:ros_basics?
ROS is open-source! The licensing is such that commercial, proprietary software can include it, making it a good choice for research and industry.
A development environment for ROS can be installed on many personal computers and operating systems. In this text, we use the following stack of software for our development environment.
VirtualBox, by Oracle, is a free virtualizer that can install a with a variety of operating systems installed. VirtualBox is cross-platform and can be installed on most modern operating systems (e.g. Windows, MacOS, Linux). This allows a host computer (your PC) with (say) Windows to run a virtual machine with (say) Linux—simultaneously!
if your computer is resource-challenged
ROS can be resource-intensive, especially when running simulations. If your personal computer is resource-challenged, especially in RAM and processing, consider forgoing VirtualBox and installing Ubuntu in dual-boot mode. More on that in a moment.
Download and install the latest VirtualBox app for your host computer: For greater functionality, consider installing the Extension Pack from the same downloads page.
This popular Linux distribution is fully compatible with the version of ROS we will use, has a long-term maintenance schedule (LTS), is lightweight, and is free. Download the Desktop (64-bit) version here: We will install this operating system as a virtual machine with VirtualBox.
if your computer is resource-challenged: dual-boot
If you decide you need to dual-boot, skip Resource and see the installation guide: The official installation guide above may not some Windows 10-specific instructions; as a supplement, see:
First, we must prepare a virtual machine with VirtualBox. Use the following steps:
In the VirtualBox app, create a virtual machine. Name it (say) ubuntu18, select and .
Allocate RAM of at least 4096 MB.
Select “Create a virtual hard disk now.”
Select “VDI (VirtualBox Disk Image).”
Select “Dynamically allocated.”
Allocate a maximum of 15-20 GB of virtual hard disk.
Select the new virtual machine ubuntu18 and .
When prompted, select as the “virtual optical drive” the downloaded Ubuntu file and .
Pay special attention to the following during the Ubuntu installation process.
.
Download updates while installing Ubuntu.
Install third-party software for graphics and Wi-Fi hardware, Flash, MP3 and other media.
Erase disk and install Ubuntu.If you’re not installing to a virtual machine, be cautious here!
The Ubuntu Bionic documentation is available here:
Installing VirtualBox Guest Additions in Ubuntu should improve the performance of your virtual machine. I recommend the following setup process.
Open a Terminal window.
Update your package manager.
sudo apt-get updateInstall Ubuntu VirtualBox Guest Additions.
sudo apt-get install virtualbox-guest-additions-isoInstall VirtualBox Guest Utilities.
sudo apt-get install virtualbox-guest-utilsRestart the virtual machine.
Your virtual machine can mount a folder on your host machine such that files can be easily shared between them. In VirtualBox, in your virtual machine’s , click the button that adds a new shared folder. Give it the path of the shared folder on the host machine and do auto-mount. This directory should now be available in the virtual machine as a mounted drive.
We will install the recent version ROS Melodic Morenia to our Ubuntu Bionic virtual machine. Follow the official instructions: It assumes you will enter the given commands in the in Ubuntu, which can be opened through the GUI or with the keyboard shortcut .
Follow the recommended options and be sure to:
install the “Desktop-Full” version;
under “Environment setup,” follow the instructions to source your environment variables in your dotfile ; and
under “Dependencies for building packages,” install the recommended tools, listed in the provided command.
Consider working through the first four ROS tutorials: Use the recommended option.
We will write most of our ROS code in . It’s best practice not to mess with Ubuntu’s Python installation and instead install our own. The package See for documentation.
will help us manage what will be multiple Python versions. Installing is easy in a Terminal.
curl https://pyenv.run | bashBe sure to open your file (e.g. ) and add the following lines.
export PATH="/home/picone/.pyenv/bin:$PATH"
eval "$(pyenv init -)"
eval "$(pyenv virtualenv-init -)"To finalize the installation, either open a new Terminal or (this will reload your so that is available to the bash shell). Now create a fresh Python 2 installation using .
pyenv install 2.7.17Now we can list installed Python versions with the following command.
pyenv versionssystem
2.7.17To set the global default Python version, use the following.
pyenv global 2.7.17You can also set local Python environments using , which sets the environment in the current and sub-directories.
In this chapter, we will explore some of the basic concepts and tools used to create ROS systems. Understanding the structure and organization of these systems is a prerequisite for developing ROS systems of our own.
Install first
Before continuing, install ROS. See .
A ROS graph is a graph (à la graph theory) representation of a ROS systems, such as that of fig. ¿fig:a_ros_graph?. Graph nodes represent ROS programs running on potentially different machines. Graph edges represent the peer-to-peer communication of messages among nodes.

roscoreJacques Lacan introduced the concept of the “big Other,” who is, among other things, the virtual repository of all knowledge, the invisible guarantor that the network of symbols is consistent, and the registrar of the symbolic.See, for instance, How to Read Lacan (Žižek, How to Read Lacan).
The big Other of ROS is the communication service \mb{roscore: all nodes of a ROS system register the message streams they provide and those to which they would like to subscribe.
These message streams are organized by topics: a node that publishes information for other nodes does so by registering a topic with roscore. roscore maintains lists of these topics and subscribers thereto and provides these details to any node upon request. If node foo publishes to a topic x, subscribed-to by node bar, foo would find out that bar has subscribed, then would directly transmit messages to bar on topic x, as shown in fig. ¿fig:a_ros_graph_topics?.

Thus, big Other roscore is virtually in all ROS graphs, required for its existence, but we don’t include it explicitly. We must launch a roscore service for every ROS system. Doing so is trivial in a Terminal window, as follows.
roscoreFortunately, we won’t have to remember to do this manually every time, as we’ll see when we discuss roslaunch in.Sub:launching_ros_nodes?
ROS code is arranged into packages. Before we can describe packages, though, we need two apparatus: the ROS build system \mb{catkin and the ROS workspace.
catkinMost software is written by programmers as source code in some programming language. In this text, we write source code in Python. When the software is ready to be used, it is converted from source code into (binary) machine code and packaged up for distribution. A piece of software that controls this process is called a build automation utility. Examples include Make, Qbs, and Cabal.
ROS has its own build system \mb{catkin built atop CMake, which is itself built on Make. It shares a name with the cluster of flowers such as that of the willow, pictured in fig. rba.pa.1. Because we are developing in Python, we will use only a few of catkin’s features, some of which are introduced in the following sections.

are directories in which you can develop ROS code. Each project should have its own workspace, and workspaces cannot interact.
We will now set up a workspace. Open a bash terminal.We assume you have sourced the ROS distribution in your file so it will load when you open a new bash terminal.
Change () to a convenient directly like your user home directory ~. Make a new directory for your code like code as follows.
cd ~ # change directory to user home
mkdir -p code # -p creates dir only if it doesn't exist
cd code # change directory into codeNow make a directory ros_ws_01 for your new workspace.
mkdir -p ros_ws_01
cd ros_ws_01Every workspace needs a source directory src.
mkdir -p src
cd srcLet’s inspect the tree we’ve made.
pwd # print current directory/home/picone/code/ros_ws_01/srcNow that we’re in the src directory, we can initialize a workspace.
catkin_init_workspaceCopying file from "/opt/ros/melodic/share/catkin/cmake/toplevel.cmake" to "/home/picone/code/ros_ws_01/src/CMakeLists.txt"As we can see, this created a file CMakeLists.txt.
ls # list files and folders in current dirCMakeLists.txtNow we can finalize our new workspace using the catkin_make command from the workspace root.
cd .. # up a level to ros_ws
catkin_makeWe have made a workspace!
Let’s investigate the new directories in our workspace.
lsbuild devel srcSo build and devel are new! We will not make much use of the former, but the latter will include the setup.language-bash file, which we will source in order to make available to our shell the new workspace.
source devel/setup.language-bashNote that this must be sourced whenever a new terminal (bash shell) is opened. Of course, you can make this automatically be sourced in your ~/.language-bashrc file, but this assumes you will only be using this workspace.
ROS are code directories containing certain files and organized in a certain way. Packages are usually written for specific applications, but could be applied to many others. The ROS community tends to share packages and develop them cooperatively, but there are privately held packages as well (the ROS license permits this).
In this section, we will create a new package. Packages are developed in a workspace’s src directory. Let’s to that of the workspace created in the preceding section.
cd ~/code/ros_ws_01/srcWe can create a new package as follows.
catkin_create_pkg sweet_package rospyCreated file sweet_package/package.xml
Created file sweet_package/CMakeLists.txt
Created folder sweet_package/src
Successfully created files in /home/picone/code/ros_ws_01/src/sweet_package. Please adjust the values in package.xml.This created the directory sweet_package and populated it with CMakeLists.txt, package.xml, and the directory src.
cd sweet_package
lsCMakeLists.txt package.xml srcThe first of these has information for and the directory src is initially empty – it will contain the package source code we will write. The package.xml file contains package metadata and should be edited.
cat package.xmlThe following is an abbreviated version of the package.xml file contents with some editing.A built-in text editor can be used (e.g. ). However, consider installing the friendlier app Sublime Text via the Ubuntu Software app store. It will give you the command (e.g. ) which you can use to easily edit many text-based files such as xml files.
<?xml version="1.0"?>
<package format="2">
<name>sweet_package</name>
<version>0.0.0</version>
<description>The sweet_package package</description>
<!-- One maintainer tag required, one per tag -->
<maintainer email="rpicone@stmartin.edu">Rico Picone</maintainer>
<!-- One license tag required, multiple allowed, one per tag -->
<license>BSD</license>
<!-- Url tags are optional, multiple allowed, one per tag -->
<url type="website">http://wiki.ros.org/sweet_package</url>
<!-- Author tags are optional, multiple allowed, one per tag -->
<author email="rpicone@stmartin.edu">Rico Picone</author>
<!-- The *depend tags are used to specify dependencies -->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>rospy</build_depend>
<build_export_depend>rospy</build_export_depend>
<exec_depend>rospy</exec_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
</export>
</package>I have filled in some of this information as an example. Of special importance are the . When we called catkin_create_package, the first argument was the name of our new package sweet_package and the second argument was a dependency rospy, a ROS package which is the dependency that is required for writing nodes in Python. Note that this dependency appears in package.xml under multiple types of depend tags; the differences among these tags will be discussed, later. For now, note that we could have added more dependencies when we created the package by listing them after rospy. But we can always add more dependencies later by directly editing package.xml.
Now that we have a package, we can add Python code files (.py) that will become ROS graph nodes to the sweet_package/src directory. Before we do this for our own package, however, let’s first learn how to run some nodes that come from pre-existing packages.
Let’s fire up some ROS nodes! Technically, we could cd around our filesystem, find packages, and start nodes withFor the curious, some nodes we’ll be starting in a second could be started by navigating to /opt/ros/melodic/share/rospy_tutorials/001_talker_listener and executing, say, python talker.py.
python <filename>.pyHowever, this is highly inconvenient. The rosbash package includes several utilities to improve this experience. Install it with the following.
sudo apt install rosbashReload your shell with exec $SHELL.
First, we might want to list files in an installed ROS package by simply executing, in any directory, \mb{rosls as follows.
rosls <package_name>Second, we might want to change to the directory of an installed ROS package with, in any directory, \mb{roscd as follows.
roscd <package_name>Third, there’s tab completion. Terminal itself has \keys{tab: in any directory with a subdirectory named foo, type cd fo<tab>. It’s a sort of autocompletion. ROS itself has this for its commands like roscd. Try starting to to type roscd rospy_tutorials and hit tab. If there’s more than one matching package, double-tap tab to get a list.
There are a couple others that we’ll explore in the following sections: rosrun and roslaunch.
In this section, we’ll start a few nodes, mostly from the rospy_tutorials package, installed with the following command.
sudo apt install ros-melodic-ros-tutorialsAs usual, after installation, exec $SHELL Before we start any nodes, we need a roscore service started.
roscoreNow open a fresh terminal. We’ll start our first “real” node with the \mb{rosrun command.
rosrun rospy_tutorials talkerIn general, the syntax is as follows.
rosrun <package_name> <program_filename> [args]So talker.py is run and should start printing something like the following every ten milliseconds.
[INFO] [1585538656.490473]: hello world 1585538656.49
[INFO] [1585538656.591393]: hello world 1585538656.59
[INFO] [1585538656.691669]: hello world 1585538656.69This talker node is publishing hello world <time> on topic chatter. In a new terminal window, let’s start a node to listen to the topic chatter: the listener node.
rosrun rospy_tutorials listenerThis should give us something like the following.
[INFO] [1585542073.580711]: /listener_6552_1585542070720I heard hello world 1585542073.58
[INFO] [1585542073.682800]: /listener_6552_1585542070720I heard hello world 1585542073.68
[INFO] [1585542073.780337]: /listener_6552_1585542070720I heard hello world 1585542073.78The ROS graph we just built is considered the “hello world” of ROS and is depicted in fig. ¿fig:talker_listener?.

You can generate similar ROS graph representations with the following, in a new Terminal.
rqt_graphWhen you’re satisfied, stop each node with ctrl+C.
It is inconvenient to manually rosrun every node for larger (i.e. typical) ROS graphs. Launch files have extension .launch and are collections of node information that the command \mb{roslaunch operates on. The example talker-listener graph from above has a launch file talker_listener.launch.
Let’s first find the launch file.
roscd rospy_tutorials/001_talker_listener
lslistener listener.py README talker talker_listener.launch talker.pyNow let’s print its contents.
cat talker_listener.launch<launch>
<node name="listener" pkg="rospy_tutorials" type="listener.py" output="screen"/>
<node name="talker" pkg="rospy_tutorials" type="talker.py" output="screen"/>
</launch>The pkg parameter for each node tag specifies the package from which the node comes; the type tag, the Python file; the output tag is often "screen" so that the node outputs to the console (instead of just a log file). The name tag may at first seem superfluous. However, it is very important: distinct names can be given to the same node type. For instance, two listener.py nodes can be launched with distinct names. This is one way of separating what is called the of a ROS graph.
From any directory, the talker-listener graph can be launched with the following call to the launch file.
roslaunch rospy_tutorials talker_listener.launchWe should get the same results as our manual (rosrun) method above.
Recall the introduction to coordinate systems in sec. mec.tf. In this section, we will learn how to use ROS to perform coordinate transformations.
tf2At this point, some things should be clear:
for a three-dimensional robot with six degrees of freedom, keeping track of even two coordinate systems (e.g. world and body-fixed) can be complicated;
adding more coorinate systems for arms, sensors, moving objects in the environment, etc.—as most real robots require—vastly complicates coordinate transformations;
coordinate transformations change with time as body-fixed coordinate systems move; and finally
keeping track of all this in an ad hoc way would be disastrous, so a systematic approach is required.
For these reason, ROS provides just such a systematic approach via its \mb{tf2 package.The tf2 package documentation can be found here: wiki.ros.org/tf2 The tf2_ros package provides Python bindings:wiki.ros.org/tf2_ros
,The tf2 package replaces the older tf package. For information about migrating, see wiki.ros.org/tf2/Migration
The tf2 package has conventions for coordinate transformation data, organized into a tree structure and buffered in time. Time-buffering is important: frequently, we need not just the latest data, but recent data as well. As with all ROS dataflow, tf2 communicates via publishing and subscribing to topics.
ROS tf2 uses quaternions to apply and store rotation information. However, it is usually easier for us to think in terms of Euler angles. The older tf package provides a nice conversion from Euler angles to quaternions:
from tf.transformations import quaternion_from_euler
q = quaternion_from_euler(ax,ay,az) # usageIn the usage example, above, rotation angles (“a”) are applied sequentially to body-fixed x, y, and z axes.
tf2In a Terminal window, enter the following to get and compile a turtle tf2 demo.
sudo apt-get install \
ros-$ROS_DISTRO-turtle-tf2 \
ros-$ROS_DISTRO-tf2-tools \
ros-$ROS_DISTRO-tfNow launch the demo with the following command.
roslaunch turtle_tf2 turtle_tf2_demo.launchA separate screen should load with two turtles. Select the Terminal window and use the arrow keys to direct one of the turtles about. The other turtle will follow, as shown in fig. rba.tf.1.
For the full demo, see wiki.ros.org/tf2/Tutorials/Introduction to tf2
In this chapter, we will learn the details of how to publish to, subscribe to, and create topics.
Get the textbook code
Make sure to start with , below. It will explain how to make the code accompanying this text available to your system.
The code we will explore and write together in the following chapters is available in the following code repository: Follow the instructions there for downloading and making it available to your ROS installation.
It's going to change
Due to the fact that the code repository is under development and will likely be updated throughout the term, I recommend using the git-based method of obtaining the repository and keeping it up-to-date. is a crash-course on how to get and configure git.
gitThis resource will help you install and configure git on your machine. It assumes you are using Ubuntu or some similar OS. It also takes you through setting up your own git repository for your ROS packages!
gitOpen a Terminal window. Update aptitude.
sudo apt updateInstall git.
sudo apt install gitCheck that it is correctly installed.
git --versiongit version 2.26.0The specific version of git isn’t important.
gitSet your name and email.
git config --global user.name "Your Name"
git config --global user.email "youremail@yourdomain.com"These are stored in . Change them there, as desired.
GitHub () is a place to remotely host a git repository. A remote host such as this is important for backup, sharing, and collaboration with git. Create a GitHub account here: To avoid having to re-enter your GitHub username and password frequently, consider setting up an SSH key from the following article:
You’ll want a repository for your ROS repositories. Create a new repository in GitHub: Consider using the following options.
Initialize this repository with a READMEIt is a good idea to have a README in every git repository. GitHub makes this easy and even renders it in a nice format on the website.
SelectThe file includes a list of extensions for git to ignore in your repository. It is convenient that there is a default one for ROS.
Now you can this repo by navigating to it in the web interface and copying the URL provided by the green button.If you have set up SSH, use the SSH URL. Otherwise, use the HTTPS URL.
Open a Terminal window and to a ROS workspace’s directory. Clone your remote repo with the following.
git clone <copied repo URL>If this is successful, you should now have local copy of your repository in the current directory.
Now set up your package repository with , as we learned in . Once your package is created, stage your changes for commit. First, see which files have changed.
git statusStage all changes for commit.
git add -A # careful with thisCommit changes.
git commit -m 'created a package'Now we can push these changes up to the remote repo.
git pushIf it fails, it will probably suggest you set as with the option. If so, just copy/paste the suggestion and try it.
You now have a git repository for your ROS packages!
Go to this book’s GitHub code repository: On the upper-right, click the button. This will give you a copy of the repository in your GitHub account. Now you can this fork by navigating to it in the web interface and copying the URL provided by the green button.If you have set up SSH, use the SSH URL. Otherwise, use the HTTPS URL.
Open a Terminal window and to a ROS workspace’s directory. Clone your remote repo with the following.
git clone <copied repo URL>Follow the directions in the README to use to make the repo packages available to ROS.
If you’d like to bring updates to the book’s GitHub repo into your fork, first add it as an upstream.
git remote add upstream \
https://github.com/ricopicone/robotics-book-code.git # or sshFetch remote branches.
git fetch upstreamMake sure you’re working on your branch.
git checkout masterNow merge your and my branches.
git rebase upstream/masterNew topics must first be registered with big Other roscore, which will thereafter advertise this topic. In rospy, the syntax is as follows.
pub = rospy.Publisher(<topic name string>,<message_type>)The first argument is the name of the topic and the second is the message type (all messages on a topic have the same type). This registers the topic name.
Later, we will learn to create our own message types, but for now we’ll stick to the standard message types defined by the ROS package \mb{std_msgs. For a list of available message types in std_msgs, see wiki.ros.org/std_msgs
The code accompanying the text has a simple publisher node in the rico_topics package. You should use catkin_create_pkg to create a parallel package in your own code repository, as follows.
catkin_create_pkg my_topics \
rospy std_msgs message_runtime message_generationWe’ll need the dependencies listed above. Create a new Python file in my_topics/src with the following.
touch my_topics/src/topic_publisher.pyOpen the empty topic_publisher.py in a text editor. You’ll want to enter here the same code as appears in the sample topic_publisher.py from robotics-book-code/rico_topics/src, which is listed in fig. ¿fig:publisher_py_listing?.
#!/usr/bin/env python
import rospy
from std_msgs.msg import Int32 # standard int
# Setup: initialize node, register topic, set rate
rospy.init_node( # initialize node
'topic_publisher' # node default name
)
pub = rospy.Publisher( # register topic w/roscore
'counter', # topic name
Int32, # topic type
queue_size=5 # queue size
)
rate = rospy.Rate(2) # adaptive rate in Hz
# Loop: publish, count, sleep
count = 0
while not rospy.is_shutdown(): # until ctrl-c
pub.publish(count) # publish count
count += 1 # increment
rate.sleep() # set by rospy.Rate aboveSince this is the first rospy node we’ve written, it’s worth considering it in detail. The first line is called a shebang and indicates the file is executable and the relevant interpreter (in this case, python). One more step is actually required to make your new file executable in Ubuntu: you must change its permissions to be executable, as follows.
chmod u+x my_topics/src/topic_publisher.pyBack to fig. ¿fig:publisher_py_listing?, following the shebang, there’s the loading of packages via Python’s package import mechanism. Note that we’re using both rospy and std_msgs, which we included in our package.xml when we used catkin_create_pkg. Then follows the initalization of a ROS node via \mpy{rospy.init_node. For more details on initializing nodes, see wiki.ros.org/rospy/Overview/Initialization and Shutdown We then register a topic counter of type Int32 (from std_msgs) and queue size of 5 via \mb{rospy.Publisher. Queue size is how many buffered messages should be stored on the topic. The general guidance is: use more than you need. For more on selecting queue size, see wiki.ros.org/rospy/Overview/Publishers and Subscribers Finally, we use rospy.Rate to specify our desired loop timing. This powerful mechanism will be used in a moment to adaptively maintain a looping rate.
The while loop in fig. ¿fig:publisher_py_listing? is pretty simple: while the node isn’t shut down,
publish the count to topic counter via the publish method of the object pub created by rospy.Publisher,
increment the count, and
wait until the sleep method says to iterate.
The Rate object rate can use its sleep method to adaptively attempt to keep the loop running at the specified rate. This timing mechanism is quite convenient.
First, we need to the workspace to make our new package available. Navigate (cd) in Terminal to your workspace root directory.
catkin_makeIf you have an error involving the Python packages em, yaml, or catkin_pkg, try installing them with the following.
pip install empy pyyaml catkin_pkgOnce your catkin_make finishes successfully, source the workspace.
source devel/setup.language-bashNow open a new Terminal and start a service. Now we can the new node!
rosrun my_topics topic_publisher.pyOur node is running! Let’s check the current topics to see if is being advertised. A nice tool for this is .
rostopic list/counter
/rosout
/rosout_aggSo it is. We can ignore the other topics, which always appear. Let’s see what is being published to the topic.
rostopic echo counter -n 3data: 17
---
data: 18
---
data: 19
---The option/value shuts down after three messages. Otherwise it would continue until we +.
We can also see how the successful our method is at maintaining our desired loop rate. (We have to + to stop this one.)
rostopic hz countersubscribed to [/counter]
average rate: 2.001
min: 0.500s max: 0.500s std dev: 0.00000s window: 2
average rate: 1.999
min: 0.500s max: 0.501s std dev: 0.00051s window: 4
average rate: 2.000
min: 0.498s max: 0.501s std dev: 0.00095s window: 6
average rate: 2.000
min: 0.498s max: 0.501s std dev: 0.00088s window: 7Not too bad!
Subscribing to topics with rospy involves two steps:
defining a callback function that is called every time a message arrives (on the topics specified in a moment) and
registering the subscription with roscore.
The name of the callback function can be anything—say, callback, but its argument should be handled as a message of the correct type (i.e. the message type of the topic to which we are subscribing). Registering the subscription with roscore is accomplished with the Subscriber method as follows.
rospy.Subscriber(
<topic name string>, # e.g. 'cool_topic_bro'
<message_type>, # e.g. Int32 from std_msgs
<callback function handle> # e.g. callback
)The first two arguments are the same as those of rospy.Publisher. The final argument is simply the name of the callback function from above.
The code accompanying the text has a simple subscriber node in the rico_topics package. You should use have used catkin_create_pkg in sec. rto.pu to create a parallel package in your own code repository—we’ll call it my_topics. Create a new Python file in my_topics/src with the following.
touch my_topics/src/topic_subscriber.py # create file
chmod u+x my_topics/src/topic_subscriber.py # make executableOpen the empty topic_subscriber.py in a text editor. You’ll want to enter here the same code as appears in the sample topic_subscriber.py from robotics-book-code/rico_topics/src, which is listed in fig. ¿fig:subscriber_py_listing?.
#!/usr/bin/env python
import rospy
from std_msgs.msg import Int32
def callback(msg): # callback for receiving messages
print(msg.data) # print to Terminal
rospy.init_node('topic_subscriber') # initialize node
sub = rospy.Subscriber('counter', Int32, callback) # subscribe
rospy.spin() # wait for node to be shut downWe see that the callback function definition def callback(msg) simply prints the message’s data to the Terminal running the node. The call to to rospy.Subscriber register’s (with roscore) this node’s subscription to the topic 'counter', with its message type Int32, and directs messages to the callback function callback, just defined.
Finally, there’s a call to rospy.spin. This function here acts to keep the node running (so it can receive messages) until it is explicitly shut down. It’s doing something like the following.
while not rospy.core.is_shutdown():
rospy.rostime.wallsleep(0.5) # secondsNow that we have created my_topics/src/topic_subscriber.py, we need to catkin_make and our workspace.
cd ros_ws_01 # if neededcatkin_makeNow we can source our workspace.
source devel/setup.language-bashNow, make sure you’ve started a service running. If not, start it with the following.
roscoreAlso make sure you still have the node running. If not, start it with the following.
rosrun my_topics topic_publisher.pyAnd now we’re ready to launch the new node.
rosrun my_topics topic_subscriber.py100
101
102The terminal prints the counter, as expected. To see who’s publishing and subscribing to , we can use as follows.
rostopic info counterType: std_msgs/Int32
Publishers:
* /topic_publisher (http://socrates:35309/)
Subscribers:
* /topic_subscriber (http://socrates:40387/)Just as we expected: is publishing to and is subscribed to the topic .
Sometimes a topic will have messages published so infrequently that it could be problematic if a subscriber misses a message because it was not-yet subscribed to the topic. In this case, we can publish a latched topic, which makes it so that every new subscriber gets the last message published to the topic. Latched topics are created with the rospy.Publisher named argument latched=True, which is by default False.
The messages that come in the std_msgs should be exhausted before considering the specification of a new message description: a line-separated list of field type-name pairs and constant type-name-value triples. For example, the following is a message description with two fields and a constant.
int32 x # field type: int32, name: x
float32 y # field type: float32, name: y
int32 Z # constant type: int32, name: ZThe field- and constant-types are usually ROS built-in types, which are shown in.Tab:built_in_ros_field_and_constant_types_for_messages?
Other field- and constant-types are possible, as described in the documentation: wiki.ros.org/msg Of particular interest are arrays of built-in types, like the variable-length array of integers int32[] foo, which is interpreted as a Python tuple.
To use a custom message description, create a \path{.msg in the subdirectory <package>/msg/ (you may need to create the subdirectory) and enter your message description.
In this section, we develop a custom message description Complex in msg/Complex.msg for messages with a real and an imaginary floating-point number. We continue to build on the package we’ve been creating in this chapter, my_topics, which shadows the package included with the book, rico_topics.
The first thing when creating a custom message description is to create the message description file.
From your package root, create it with the following.
mkdir msg
touch msg/Complex.msgNow we can edit the contents of Complex.msg to include the following.
float32 real
float32 imaginaryBoth field types are float32 and have field names real and imaginary.
We are now ready to update the build-system
The package we’ve been working on in this chapter, my_topics, was created with a bit of forethought: we included as dependencies in our catkin_create_pkg call the packages message_runtime and message_generation. If we hadn’t had such foresight, we would have to make several changes in our package’s package.xml and CMakeLists.txt files before proceeding to create our own message description. As it stands, we still need to make a few changes to them.
package.xmlIncluding message_runtime and message_generation in our catkin_create_pkg call yielded the following lines in our package.xml, which would otherwise need to be added manually.
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>However, we still need to add message_runtime as a <build_depend>.
<build_depend>message_runtime</build_depend>CMakeLists.txtIncluding message_runtime and message_generation in our catkin_create_pkg call yielded the following lines in our CMakeLists.txt, which would otherwise need to be added manually. As an additional line in the find_package(...) block, we would need the following.
message_generationThe rest of the changes we do need to make manually. As an additional line in the catkin_package(...) block, we need the following.
CATKIN_DEPENDS message_runtimeThe add_message_files(...) block needs uncommented and edited to appear as follows.
add_message_files(
FILES
Complex.msg
)We have already created the Complex.msg file.
Finally, the generate_messages(...) block needs to be uncommented such that it appears as follows.
generate_messages(
DEPENDENCIES
std_msgs
)Now our package is set up to use the message type Complex—or, it will be once we catkin_make our workspace. First, let’s write a simple publisher and subscriber to try it out.
We can now write a publisher and subscriber that publish and subscribe to messages with type Complex. Create (touch) a Python node file my_topics/src/message_publisher.py, change its permissions to user-executable (chmod u+x), and edit it to have the same contents as the rico_topics/src/message_publisher.py file shown in fig. ¿fig:message_publisher_py_listing?.
Repeat a similar process to create a my_topics/src/message_subscriber.py with the same contents as the rico_topics/src/message_subscriber.py file shown in fig. ¿fig:message_subscriber_py_listing?.
#!/usr/bin/env python
import rospy
from rico_topics.msg import Complex # custom message type
from random import random # for random numbers!
rospy.init_node('message_publisher') # initialize node
pub = rospy.Publisher( # register topic
'complex', # topic name
Complex, # custom message type
queue_size=3 # queue size
)
rate = rospy.Rate(2) # set rate
while not rospy.is_shutdown(): # loop
msg = Complex() # declare type
msg.real = random() # assign value
msg.imaginary = random() # assign value
pub.publish(msg) # publish!
rate.sleep() # sleep to keep rate#!/usr/bin/env python
import rospy
from rico_topics.msg import Complex
def callback(msg):
print 'Real:', msg.real # print real part
print 'Imaginary:', msg.imaginary # print imag part
print # blank line
rospy.init_node('message_subscriber') # initialize node
sub = rospy.Subscriber( # register subscription
'complex', # topic
Complex, # custom type
callback # callback function
)
rospy.spin() # keep node running until shut downLet’s try it out. Navigate to your workspace root and build your workspace.
catkin_makeFire up a roscore. In a new Terminal, in your workspace root, source devel/setup.language-bash then run the publisher node.
rosrun my_topics message_publisher.pyIn another new Terminal, in your workspace root, again source devel/setup.language-bash then run the subscriber node.
rosrun my_topics message_subscriber.pyReal: 0.308157861233
Imaginary: 0.229206711054
Real: 0.121079094708
Imaginary: 0.568501293659
Real: 0.807860195637
Imaginary: 0.486804276705It works! Random complex numbers are being printed by the message_subscriber.py node.
ROS topics have hardly been exhausted, and this will remain true even after we consider a few more aspects of special note.
rosmsg commandThe rosmsg command comes with the rosbash package already installed. It allows us to explore which messages are described and their descriptions.
As always, we need to navigate to our workspace.
cd ros_ws_01Then source it!
source devel/setup.language-bashThe show option lists message descriptions. Even our Complex custom definition can be listed in this way.
rosmsg show Complex[rico_topics/Complex]:
float32 real
float32 imaginary
[my_topics/Complex]:
float32 real
float32 imaginaryThis is how we could see the message description of a geometry_msgs message Point.
rosmsg show geometry_msgs/Pointfloat64 x
float64 y
float64 zThe package option lets us list those messages defined in a given package.
rosmsg package my_topicsmy_topics/ComplexFor the tf2_msgs package, which groups the Error and Transform messages for tf2_ros, several message definitions are provided.
rosmsg package tf2_msgstf2_msgs/LookupTransformAction
tf2_msgs/LookupTransformActionFeedback
tf2_msgs/LookupTransformActionGoal
tf2_msgs/LookupTransformActionResult
tf2_msgs/LookupTransformFeedback
tf2_msgs/LookupTransformGoal
tf2_msgs/LookupTransformResult
tf2_msgs/TF2Error
tf2_msgs/TFMessageThe list option lists all messages available to ROS.
rosmsg listWe have suppressed the output, which is long.
Why not? This is actually rather common. Consider the example node robotics-book-code/rico_topics/doubler.py, listed in fig. ¿fig:doubler_py_listing?. This node subscribes to topic number, multiplies the received msg.data (an Int32) by two, and publishes the result (an Int32) to topic doubled.
Perhaps the most interesting aspect of this is that, instead of publishing at some set rate, the publishing happens inside the callback. This means a new message will be published to doubled right after a new message is published to topic number. This is frequently the most desirable behavior.
#!/usr/bin/env python
import rospy
from std_msgs.msg import Int32
rospy.init_node('doubler') # initialize node
def callback(msg):
doubled = Int32() # declare
doubled.data = msg.data * 2 # double
pub.publish(doubled) # publish in callback!
sub = rospy.Subscriber('number', Int32, callback)
pub = rospy.Publisher('doubled', Int32, queue_size=3)
rospy.spin() # keep node running until shut downA ROS service is effectively a function one node (the server) provides to other nodes (the clients).
\emph{i can haz service?} a script
Pretty much, if we have Node A [server] and Node B [client]:
Node A: “Yo I can do X service [registers a service],”
Node B: “Node A, do X for me plz? [requests service]” and waits
Node A: does X [service occurs]
Node A: sends Node B the result of doing X [server returns values]
Node B: “thnks fam” [I just assume this happens].
A key aspect to services is that they are synchronous: a client waits, doing nothing else, while the server “services” it. So obviously this only works well for tasks that take a limited amount of time, such as:
getting a sensor value,
setting a parameter, or
performing a computation.
In this section, we develop a custom service type definition WordCount in srv/WordCount.srv for a service that has as input a string and as output the number of words in that string. We create a new package for this chapter, my_services, which shadows the package included with the book, rico_services. So use, in your workspace’s src directory, use catkin_create_pkg to create a package, as follows.
catkin_create_pkg my_services \
roscpp rospy message_generation message_runtimeThe first thing when creating a custom service definition is to create the service definition file.
From your package root, create it with the following.
mkdir srv # traditional directory for service definitions
touch srv/WordCount.srvNow we can edit the contents of WordCount.srv to include the following.
string words
---
uint32 countAbove the delimiter “---” are input field types and names and below the delimiter are output field types and names.
We are now ready to update the build-system.
The package we’re creating in this chapter, my_services, was created with a bit of forethought: we included as dependencies in our catkin_create_pkg call the packages message_runtime and message_generation. If we hadn’t had such foresight, we would have to make several changes in our package’s package.xml and CMakeLists.txt files before proceeding to create our own message description. As it stands, we still need to make a few changes to them.
package.xmlIncluding message_runtime and message_generation in our catkin_create_pkg call yielded the following lines in our package.xml, which would otherwise need to be added manually.
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>However, we still need to add message_runtime as a <build_depend>.
<build_depend>message_runtime</build_depend>CMakeLists.txtIncluding message_runtime and message_generation in our catkin_create_pkg call yielded the following lines in our CMakeLists.txt, which would otherwise need to be added manually. As an additional line in the find_package(...) block, we would need the following.
message_generationThe rest of the changes we do need to make manually. The add_service_files(...) block needs uncommented and edited to appear as follows.
add_service_files(
FILES
WordCount.srv
)We have already created the WordCount.srv file.
Finally, the generate_messages(...) block needs to be uncommented such that it appears as follows.
generate_messages(
DEPENDENCIES
std_msgs
)Now our package is set up to use the service type WordCount—or, it will be once we catkin_make our workspace. (Go ahead and do so now.)
rossrvThe package rosmsg (already installed) includes the command rossrv, which gives information about services.
rossrvrossrv is a command-line tool for displaying information about ROS Service types.
Commands:
rossrv show Show service description
rossrv info Alias for rossrv show
rossrv list List all services
rossrv md5 Display service md5sum
rossrv package List services in a package
rossrv packages List packages that contain servicesWe could try it on our new service type WordCount as follows.
rossrv show WordCount[my_services/WordCount]:
string words
---
uint32 count
[rico_services/WordCount]:
string words
---
uint32 countSo the WordCount service type is available in both packages rico_services and my_services. We have successfully created a service type! In sec. rsv.sv, we’ll learn to serve and call this service type.
Creating a server node is our first consideration.
Here are some key aspects of a rospy server, listed below as instructions for creating such a node.
Import the service type and its Response function:
from <pkg>.srv import <srv_type> <srv_type>Response.
Define a function to serve:
def fun(request).
Register a service:
rospy.Service(<srv_name>,<srv_type>,<fun>).
Wait for service requests: rospy.spin().
The service function can return:
a <srv_type>Response object:
return <srv_type>Response(<value1>,<value2>,...) or
a single value (matching a single service output type):
return <value> or
a list of values (matching the output types):
return [<value1>,<value2>,...] or
a dictionary of values (matching the output names and types): return {'name1':<value1>,'name2':<value2>.
#!/usr/bin/env python
import rospy
from rico_services.srv import WordCount, WordCountResponse
def count_words(request):
return len(request.words.split()) # num of words
rospy.init_node('service_server')
service = rospy.Service( # register service
'word_count', # service name
WordCount, # service type
count_words # function service provides
)
rospy.spin()Let’s implement our new service word_count, created in sec. rsv.in label=in. We need a server node to do so. Create (touch) a Python node file my_services/src/service_server.py, change its permissions to user-executable (chmod u+x), and edit it to have the same contents as the rico_services/src/service_server.py file shown in fig. ¿fig:service_server_py_listing?.
The key elements to creating a client node are:
Import the service:
from <pkg>.srv import <srv_type>.
Wait for a service:
rospy.wait_for_service('service_name').
Set up a proxy server for communication:
rospy.ServiceProxy(<srv_name>,<srv_type>).
Use the service: fun(...).
#!/usr/bin/env python
import rospy
from rico_services.srv import WordCount
import sys
rospy.init_node('service_client')
rospy.wait_for_service('word_count') # wait for registration
word_counter = rospy.ServiceProxy( # set up proxy
'word_count', # service name
WordCount # service type
)
words = ' '.join(sys.argv[1:]) # parse args
word_count = word_counter(words) # use service
print(words+'--> has '+str(word_count.count)+' words')Let’s create a client for our new service word_count. We need a client node to do so. Create (touch) a Python node file my_services/src/service_client.py, change its permissions to user-executable (chmod u+x), and edit it to have the same contents as the rico_services/src/service_client.py file shown in fig. ¿fig:service_client_py_listing?.
The only thing that may surprise us here is the line
words = ' '.join(sys.argv[1:]). The inner statement sys.argv[1:] returns a list of command-line arguments supplied to the node. Then ' '.join(...) concatenates the (string) elements of the list with a space character between each pair. This is one of many ways we could parse command-line arguments.
Navigate to your workspace root and build the workspace.
catkin_makeRun a roscore. In a new Terminal, in your workspace root, source devel/setup.language-bash, then run the server node.
rosrun my_services service_server.pyIn a new Terminal, in your workspace root, source devel/setup.language-bash, then run the client node with command line arguments passed.
rosrun my_services service_client.py hello world sweet worldhello world sweet world--> has 4 wordsIt works!
A ROS action is effectively a function one node (the action server) asynchronously provides to other nodes (the clients). Note this is just like service, but with the asynchronicity of a topic. Like a service, an action has a goal and a result; but unlike a service, an action also provides feedback during execution. This makes actions more suitable for goal-oriented tasks that take time, such as:
In this section, we develop a custom action type definition Timer in action/Timer.action for an action that has as
a duration to wait time_to_wait;
a total actual duration waited time_elapsed and a total uint32 number of feedback updates sent updates_sent; and
a duration waited so far time_elapsed and a duration left to wait time_remaining.
why a timer though
The action is for demonstration purposes only and shouldn’t be used to implement timing in a ROS graph. For timing, use .
We create a new package for this chapter, my_actions, which shadows the package included with the book, rico_actions. So, in your workspace’s src directory, use catkin_create_pkg to create a package, as follows.
catkin_create_pkg my_actions roscpp rospy actionlib_msgsThe first thing when creating a custom action definition is to create the action definition file.
From your package root, create it with the following.
mkdir action
touch action/Timer.actionNow we can edit the contents of Timer.action to include the following.
# inputs
duration time_to_wait
---
# outputs
duration time_elapsed
uint32 updates_sent
---
# feedback
duration time_elapsed
duration time_remainingAbove the first delimiter “---” are input field types and names; between the delimiters are output field types and names; and after the second delimiter are feedback field types and names.
We are now ready to update the build-system.
The package we’re creating in this chapter, my_actions, was created with a bit of forethought: we included as dependencies in our catkin_create_pkg call the package actionlib_msgs for creating actions. If we hadn’t had such foresight, we would have to make several changes in our package’s package.xml and CMakeLists.txt files before proceeding to create our own message description. As it stands, we still need to make a few changes to them.
package.txtIncluding actionlib_msgs in our catkin_create_pkg call yielded the following lines in our package.xml, which would otherwise need to be added manually.
<build_depend>actionlib_msgs</build_depend>
<build_exec_depend>actionlib_msgs</build_exec_depend>
<exec_depend>actionlib_msgs</exec_depend>CMakeLists.txtIncluding actionlib_msgs in our catkin_create_pkg call yielded the following lines in our CMakeLists.txt, which would otherwise need to be added manually. As an additional line in the find_package(...) block, we would need the following.
actionlib_msgsThe rest of the changes we do need to make manually. The add_action_files(...) block needs uncommented and edited to appear as follows.
add_action_files(
DIRECTORY action
FILES Timer.action
)We have already created the Timer.action file.
The generate_messages(...) block needs to be uncommented and actionlib_msgs added such that it appears as follows.
generate_messages(
DEPENDENCIES
actionlib_msgs
std_msgs
)Finally, the catkin_package block also needs uncommented and actionlib_msgs added such that it appears as follows.
catkin_package(
CATKIN_DEPENDS
actionlib_msgs
)Now our package is set up to use the action type Timer—or, it will be once we catkin_make our workspace. (Go ahead and do so now.) As before with services, catkin_make will take our action definition and create several message definition .msg files. This highlights the fact that an action communicates via services.
We have successfully created an action type! In,Lec:serving_and_calling_a_ros_action?
we’ll learn to serve and call this action type.
Creating an action server node is our first consideration.
Here are some key aspects of a rospy action server, listed below as instructions for creating such a node.
Import the Python package actionlib:
import actionlibImport the action’s generated message types:
from <pkg>.msg import <action_type>Action, \
<action_type>Goal, <action_type>Result, <action_type>FeedbackDefine an action function to serve:
def do_action(goal):Check for errors in client request and abort with result if necessary:
result = <action_type>Result() # create result object
result.<field_name> = <field_value> # set result(s)
server.set_aborted(result,"An abort message")While goal isn’t yet met, do the following in a timed loop.
Check for client request to preemptively abort goal and abort with result if necessary:
if server.is_preempt_requested():
result = <action_type>Result() # create result obj
server.set_preempted(result,"Preempted abort msg")
returnSet and publish feedback:
feedback = <action_type>Feedback() # create fdbck obj
feedback.<field_name> = <field_value> # set feedback
server.publish_feedback(feedback) # publish feedbackWhen goal is met, publish the result:
result = <action_type>Result() # create result object
result.<field_name> = <field_value> # set result(s)
server.set_succeeded(result,"A success message")Register an action:
server = actionlib.SimpleActionServer(
'server_name', # server name string
<action_type>Action, # action Action message type
do_action, # action function
False # autostart server? always set to False
)Start the action and wait for requests:
server.start()
rospy.spin()#! /usr/bin/env python
import rospy
import time # for regular Python timing
import actionlib # for actions!
from rico_actions.msg import \
TimerAction, TimerGoal, TimerResult, TimerFeedback
def do_timer(goal): # action function
start_time = time.time()
update_count = 0
if goal.time_to_wait.to_sec() > 60.0: # check req duration
result = TimerResult()
result.time_elapsed = rospy.Duration.from_sec(
time.time() - start_time)
result.updates_sent = update_count
server.set_aborted(result, "Aborted: too long to wait")
return # too long of a requested wait
while (time.time()-start_time) < goal.time_to_wait.to_sec():
# waiting to meet goal duration
if server.is_preempt_requested(): # check preemption
result = TimerResult()
result.time_elapsed = rospy.Duration.from_sec(
time.time() - start_time)
result.updates_sent = update_count
server.set_preempted(result, "Timer preempted")
return
feedback = TimerFeedback()
feedback.time_elapsed = rospy.Duration.from_sec(
time.time() - start_time)
feedback.time_remaining = \
goal.time_to_wait - feedback.time_elapsed
server.publish_feedback(feedback)
update_count += 1
time.sleep(1.0)
result = TimerResult()
result.time_elapsed = rospy.Duration.from_sec(
time.time() - start_time)
result.updates_sent = update_count
server.set_succeeded(result, "Timer completed successfully")
rospy.init_node('timer_action_server') # initialize node
server = actionlib.SimpleActionServer(
'timer', TimerAction, do_timer, False
)
server.start()
rospy.spin()Let’s implement our new action Timer, created in.Lec:introducing_ros_actions?
We need an action server node to do so. Create (touch) a Python node file my_actions/src/fancy_action_server.py, change its permissions to user-executable (chmod u+x), and edit it to have the same contents as the rico_services/src/fancy_action_server.py file shown in fig. ¿fig:action_server_py_listing? (be sure to change rico_actions to my_actions).
The key elements to creating an action client node are:
Import the Python package actionlib:
import actionlibImport the action’s generated message types:
from <pkg>.msg import <action_type>Action, \
<action_type>Goal, \
<action_type>Result, \
<action_type>FeedbackDefine a feedback callback function:
def feedback_cb(feedback):Do whatever you like with the feedback in here.
Register an action client and wait for server connection:
client = actionlib.SimpleActionClient(
'server_name', # action server name
<action_type>Action # action Action message
)
client.wait_for_server()Define and send goal to server:
goal = <action_type>Goal()
goal.<field_name> = <field_value> # set goal field(s)
client.send_goal(goal, feedback_cb=feedback_cb) # send toWait for results, then do what you like with them:
client.wait_for_result()Let’s create a client for our new action Timer. We need a client node to do so. Create (touch) a Python node file my_actions/src/fancy_action_client.py, change its permissions to user-executable (chmod u+x), and edit it to have the same contents as the rico_actions/src/fancy_action_client.py file shown in fig. ¿fig:action_client_py_listing? (be sure to change rico_actions to my_actions).
#! /usr/bin/env python
import rospy
import time # for regular Python timing
import actionlib # for actions!
from rico_actions.msg import \
TimerAction, TimerGoal, TimerResult, TimerFeedback
def the_feedback_cb(feedback): # feedback callback function
print('[Feedback] Time elapsed: %f' %
(feedback.time_elapsed.to_sec()))
print('[Feedback] Time remaining: %f' %
(feedback.time_remaining.to_sec()))
rospy.init_node('timer_action_client') # initialize node
client = actionlib.SimpleActionClient( # register client
'timer', # action server name
TimerAction # action Action message
)
client.wait_for_server() # wait for action server
goal = TimerGoal() # create goal object
goal.time_to_wait = rospy.Duration.from_sec(5.0) # set field
# Uncomment this line to test server-side abort:
# goal.time_to_wait = rospy.Duration.from_sec(500.0)
client.send_goal(goal, feedback_cb=the_feedback_cb ) # send goal
# Uncomment these lines to test goal preemption:
# time.sleep(3.0)
# client.cancel_goal()
client.wait_for_result() # wait for action server to finish
# print results:
print('[Result] State: %d' % (client.get_state()))
print('[Result] Status: %s' % (client.get_goal_status_text()))
if client.get_result():
print('[Result] Time elapsed: %f' %
(client.get_result().time_elapsed.to_sec()))
print('[Result] Updates sent: %d' %
(client.get_result().updates_sent))Let’s make a launch file for our action server and client nodes. Navigate to your my_actions directory and create (touch) a file fancy_action.launch. Now edit it to include the contents shown in fig. ¿fig:code_listing_for_launch_file_fancy_action_launch?.
<launch>
<node name="server" pkg="my_actions" type="fancy_action_server.py" output="screen"/>
<node name="client" pkg="my_actions" type="fancy_action_client.py" output="screen"/>
</launch>Navigate to your workspace root and build the workspace.
catkin_makeSource your workspace: source devel/setup.language-bash. Now launch the ROS graph with the following.
roslaunch my_actions fancy_action.launch... logging to /home/socrates/.ros/log/....log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://socrates:44495/
SUMMARY
========
PARAMETERS
* /rosdistro: melodic
* /rosversion: 1.14.5
NODES
/
client (rico_actions/fancy_action_client.py)
server (rico_actions/fancy_action_server.py)
auto-starting new master
process[master]: started with pid [9827]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 9f2db0a0-8c0f-11ea-a1ae-0800272f9db4
process[rosout-1]: started with pid [9838]
started core service [/rosout]
process[server-2]: started with pid [9845]
process[client-3]: started with pid [9846]
[Feedback] Time elapsed: 0.000013
[Feedback] Time remaining: 4.999987
[Feedback] Time elapsed: 1.002952
[Feedback] Time remaining: 3.997048
[Feedback] Time elapsed: 2.008340
[Feedback] Time remaining: 2.991660
[Feedback] Time elapsed: 3.017035
[Feedback] Time remaining: 1.982965
[Feedback] Time elapsed: 4.022336
[Feedback] Time remaining: 0.977664
[Result] State: 3
[Result] Status: Timer completed successfully
[Result] Time elapsed: 5.028862
[Result] Updates sent: 5
[client-3] process has finished cleanly
log file: /home/socrates/.ros/log/....logWe see the feedback printing as expected, along with the final results. The resulting goal status, accessed by client.get_goal_status_text(), is 'Timer completed successfully'.
actionlib documentationThe core of what we have used to construct our action server and client is the actionlib ROS package: wiki.ros.org/actionlib The rospy (Python) library API is here for the SimpleActionServer class: ricopic.one/redirect/SimpleActionServer And here for the SimpleActionClient class: ricopic.one/redirect/SimpleActionClient